AI×製造
CAD不要の物体姿勢推定、製造・物流に革新
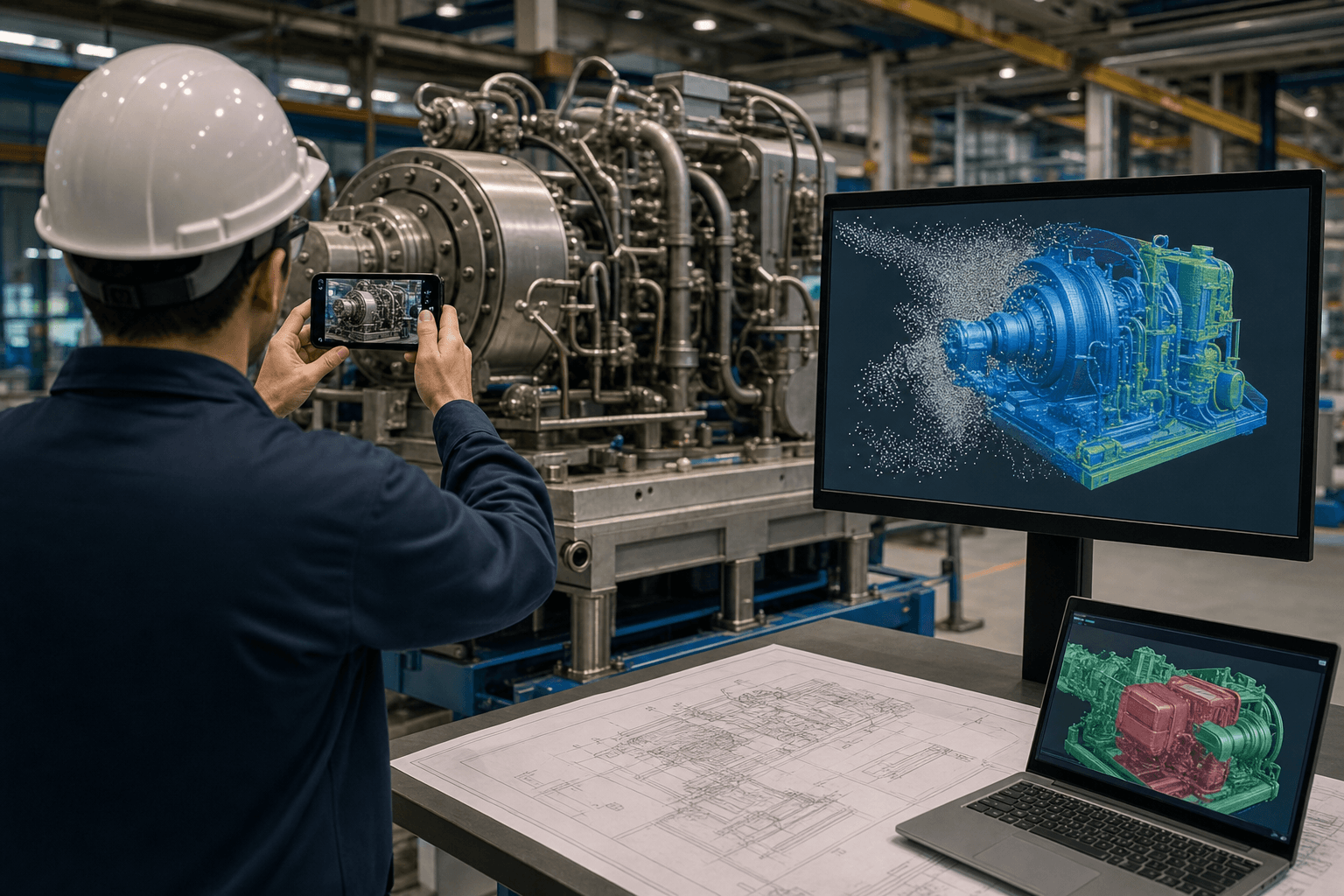
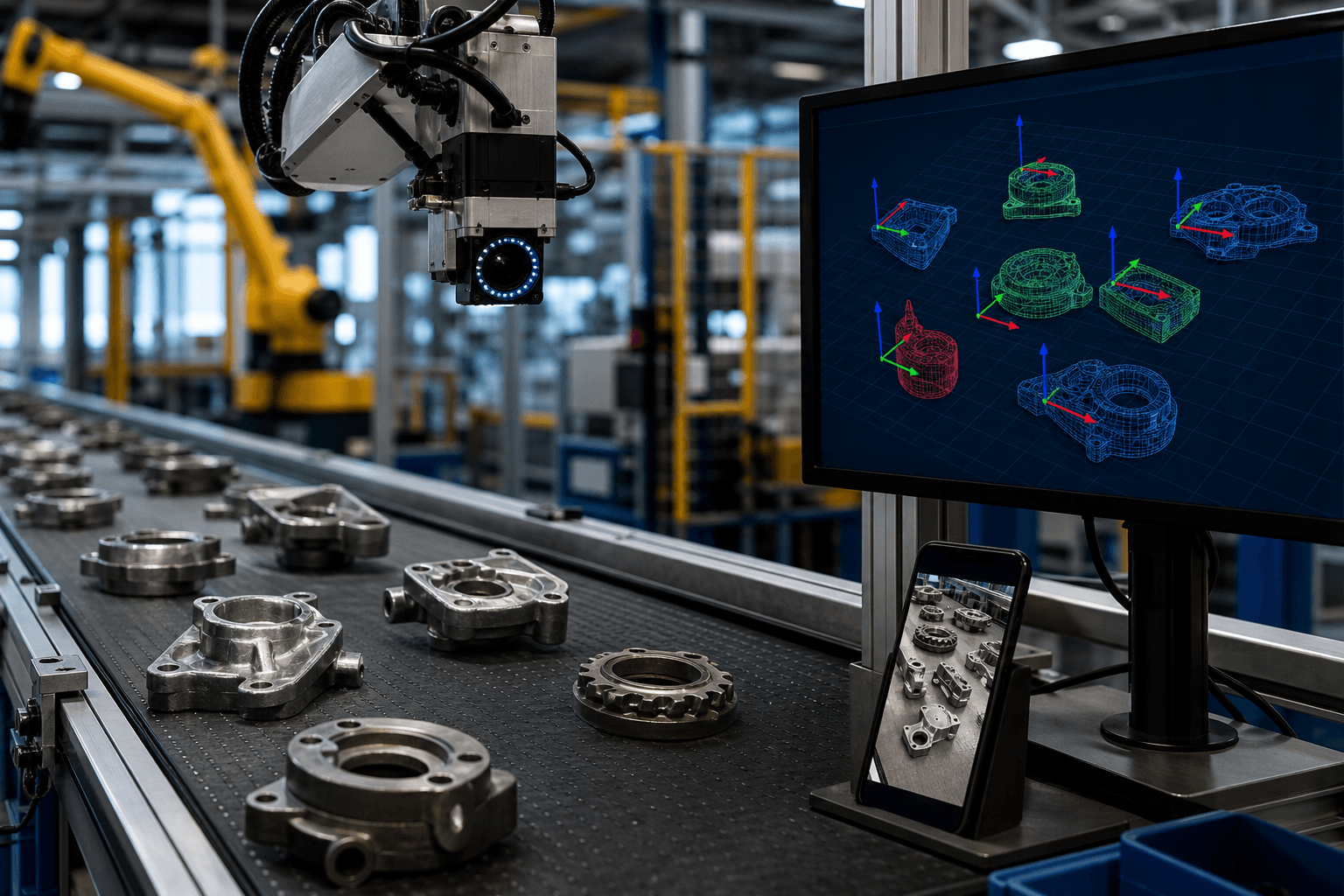
東工大らの研究チームが、CADモデルなしで任意の物体の6次元姿勢を推定するAIフレームワーク「PANY」を発表した。ロボット導入コストを大幅に削減し、製造・物流業界の自動化加速が期待される。
全セクション横断 12 件
東工大らの研究チームが、CADモデルなしで任意の物体の6次元姿勢を推定するAIフレームワーク「PANY」を発表した。ロボット導入コストを大幅に削減し、製造・物流業界の自動化加速が期待される。
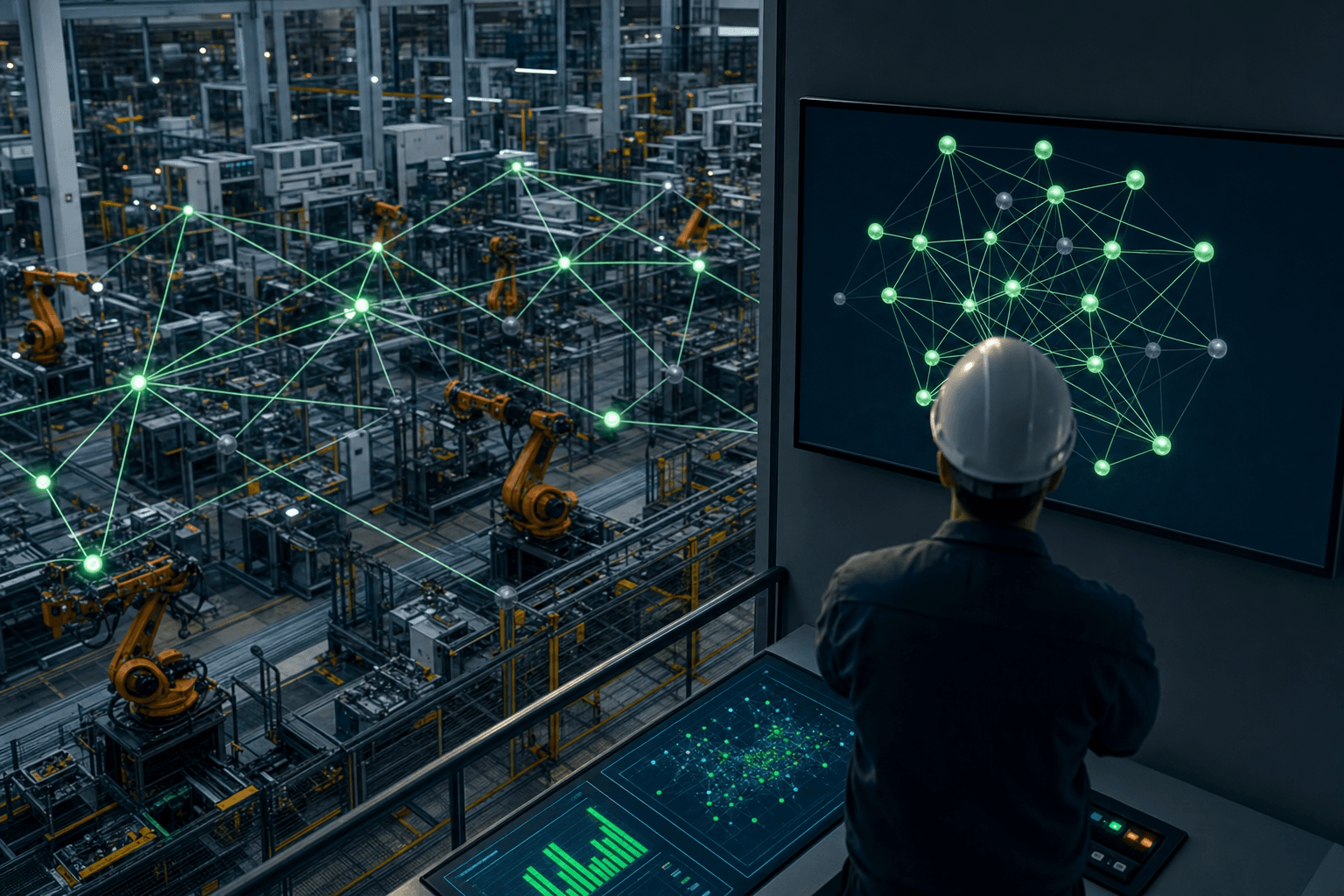
大阪大学などの研究チームが、ハイパーグラフを用いた意味認識通信フレームワーク「HISR」を開発し、従来比最大36.6%の意味推論精度向上を実証した。通信インフラのコスト削減と産業用IoTの信頼性強化に直結する成果である。
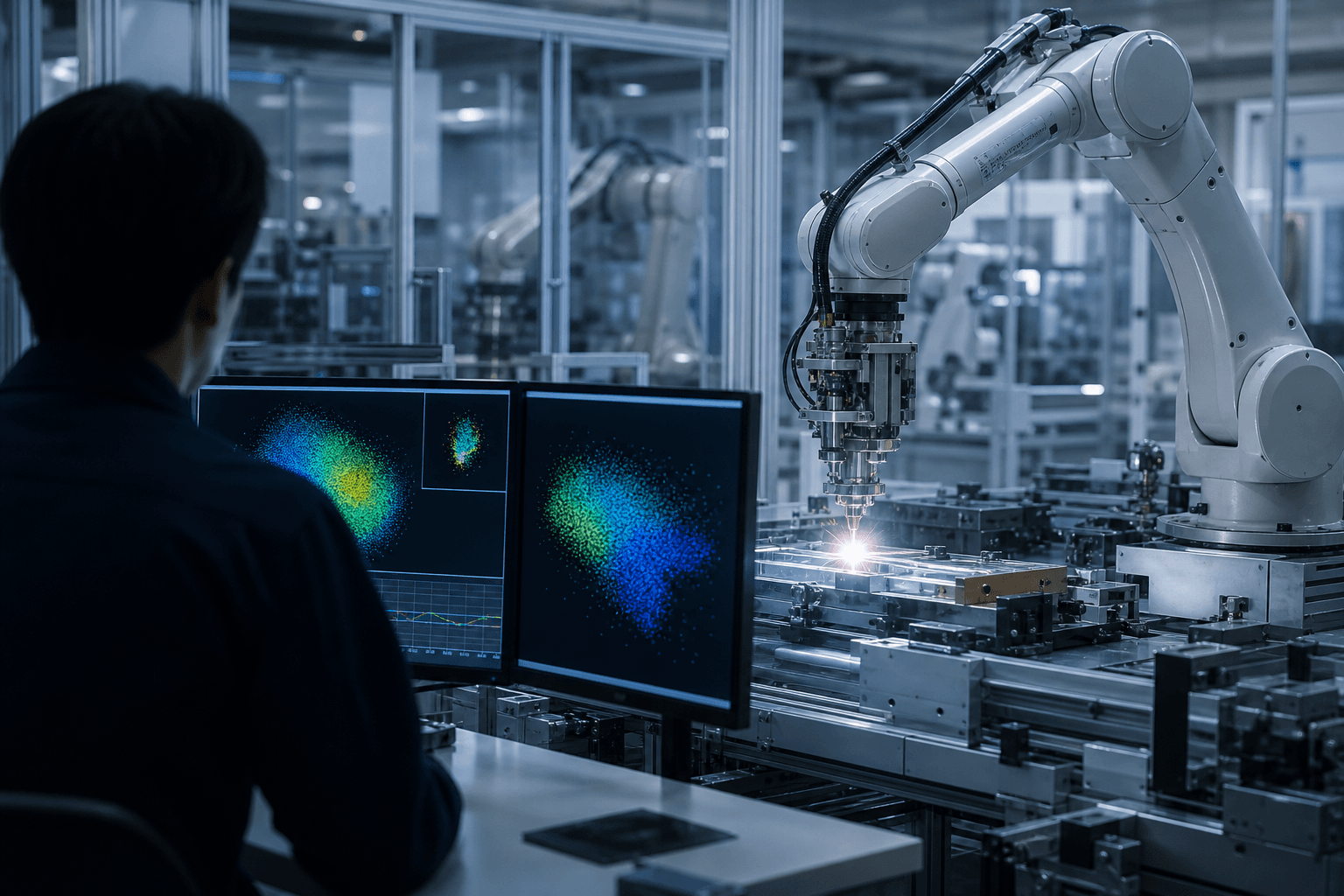
ベルリン工科大学などの研究チームが、仮想空間と現実環境のデータ差異を埋める新手法を開発した。製造業や物流分野でのロボット導入コスト大幅削減につながる可能性がある。

米研究者が開発した「実行状態カプセル」技術により、エッジ端末上のAI推論の応答遅延が大幅に短縮される。製造・医療・サービス業でのリアルタイムAI活用に直結する成果である。

行列リー群を直接トークンとする新しいアテンション機構が発表された。製造・物流・ロボティクス分野で空間変換の認識精度を大幅に高め、モデルのパラメータ数を最大80分の1に削減できる可能性がある。

スタンフォード大など国際研究チームが発表したWRBenchベンチマークは、主要23モデルを検証し、現行のAIワールドモデルが「観測されていない間も世界が継続する」という物理的一貫性を維持できないことを実証した。自動運転・製造シミュレーション・ゲーム開発など多分野の開発戦略に直接影響を及ぼす。

ミュンヘン工科大学などの研究チームが、視覚言語モデルに3次元空間推論能力を大幅な計算コスト削減で付与する手法「OneCanvas」を発表した。製造・物流・建設分野のAI活用を根本から変える可能性がある。

米国の研究者が拡散モデルに後退コルモゴロフ方程式を組み込む手法を開発し、製造ラインの制御精度を従来比28.4%改善、デッドロック事象を96%削減することを実証した。ロボティクスと産業制御の実用化を加速させる可能性がある。
米研究者らがロボットポリシーの推論時誘導と自己改善を可能にするフレームワーク「VERITAS」を発表した。人間の介入なしに専門家デモと同等の学習効率を実現する本技術は、製造・物流業界の自動化コスト構造を根本から変える可能性を持つ。
米研究チームがLLMエージェントの構成要素を規格化するフレームワーク「AgentSpec」を発表した。AIシステムの設計効率と性能予測可能性が高まり、企業の自動化投資判断に大きな示唆を与える。

京都大学などの研究チームが、複数のAIエージェントが互いに役割を分担しながら相反する複数目標を同時最適化する強化学習手法「PCMA」を発表した。交通制御や物流など複雑な業務意思決定の自動化に道を開く成果である。

米カリフォルニア大学バークレー校などの研究チームが、任意枚数のRGB画像から一貫性のある3D表面形状をリアルタイムに生成するモデル「Surflo」を発表した。製造・小売・建設など広範な産業でデジタルツイン構築コストの大幅削減が見込まれる。