合成データでヒト型ロボが自律操作を習得
スタンフォード大学らの研究チームが、実環境を3D再構築した合成データのみでヒト型ロボットに物体搬送・ナビゲーションを学習させる手法「VLK」を発表した。人手によるデータ収集を不要とし、製造・物流・医療現場への実用展開を加速させる可能性がある。
研究の概要
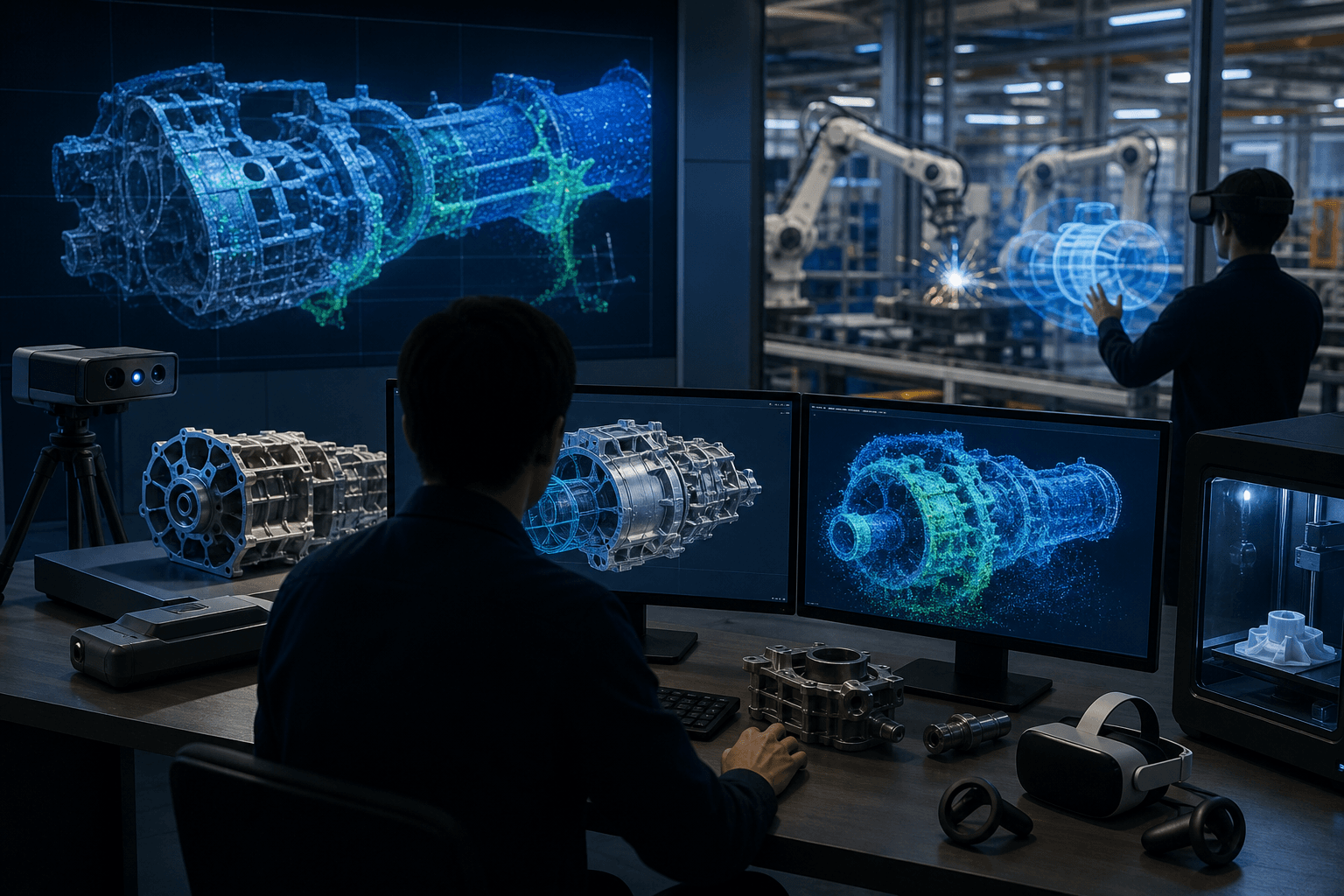
ヒト型ロボットが視覚と言語指示に基づいて全身を協調させながら自律行動するには、一人称視点映像・言語コマンド・ロボット適合の運動軌道という三つの情報が同期したデータが不可欠である。しかし、このような完全なデータセットはこれまで存在しなかった。
スタンフォード大学、UCバークレー、Covariant.AIなどの共同研究チームが発表した**VLK(Vision-Language-Kinematics)**フレームワークは、この課題を合成データで解決する。3D Gaussian Splattingと呼ばれる技術で実内環境をメートル精度で三次元再構築し、その仮想空間内でロボットの移動・物体操作の軌道を自動生成、一人称映像と組み合わせて教師データとする。
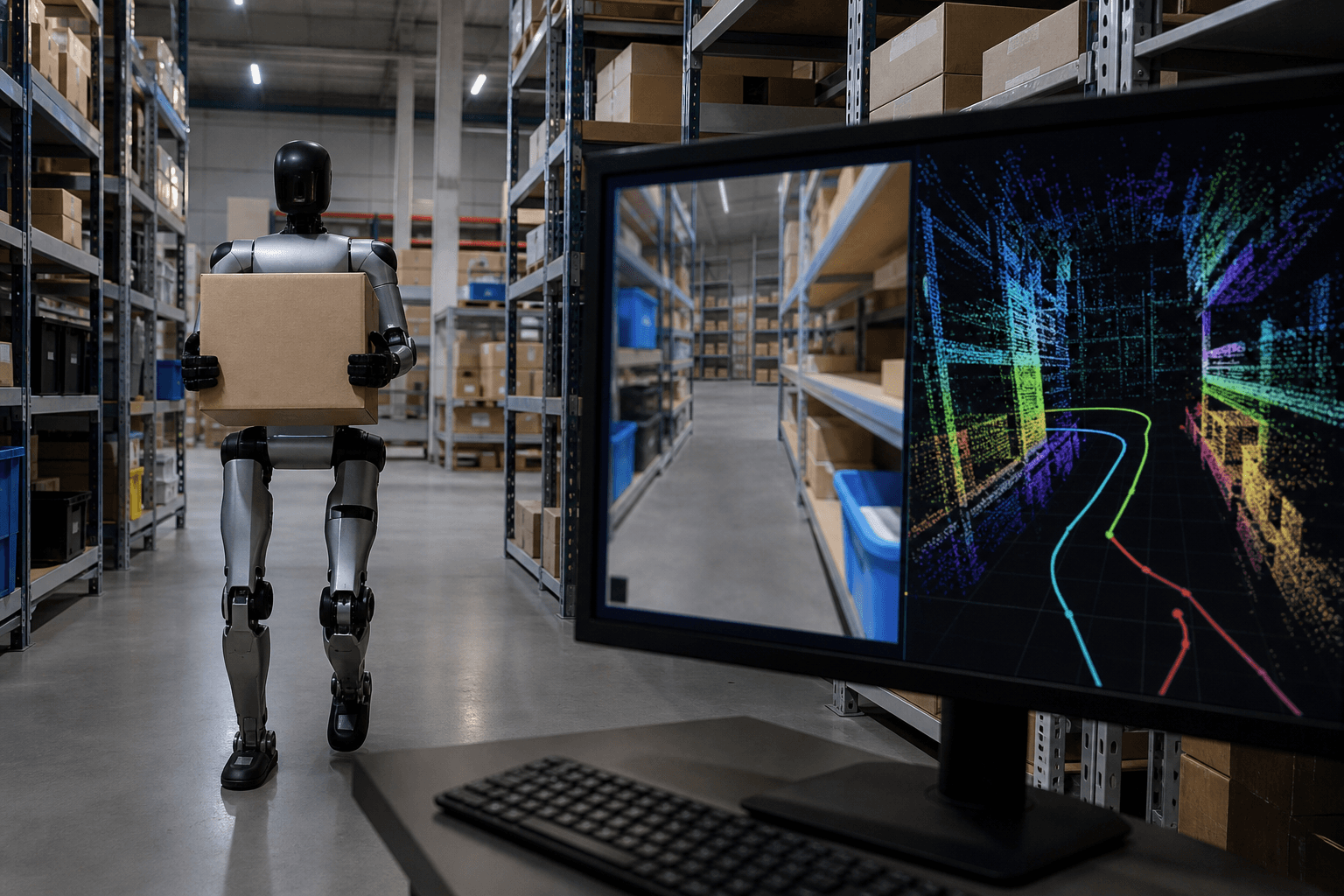
人手を一切介さずに4万8000件のペア軌道を生成し、実機であるUnitree G1ヒト型ロボットでナビゲーションと単一物体の搬送タスクを実証した。仮想環境で学習した方策が実環境に移転(sim-to-real)できることを確認している。
ビジネスへの示唆
この研究が産業界に与えるインパクトは、ロボット導入コストの構造的な変革にある。従来、ロボットに新タスクを習得させるには熟練エンジニアによるデモンストレーションや大量のラベル付き実データが必要で、導入コストと期間が普及の障壁となっていた。VLKは実環境のスキャンさえあれば自動で学習データを量産できるため、以下の部門・KPIに直接影響する。
- 物流・倉庫管理部門:ピッキング作業の自動化率、オーダーフルフィルメント時間の短縮、人件費比率の改善
- 製造ライン管理部門:段取り替え時間の削減、ラインバランス効率の向上
- 医療・介護施設の運営部門:物品搬送業務における人的稼働時間の削減、スタッフの患者ケア集中度向上
- 小売・店舗オペレーション部門:棚卸し・補充作業の無人化率、夜間稼働コストの最適化
とりわけ物流業界では、人手不足と配送需要の増大が慢性的な課題となっている。現場のスキャンデータからわずかな期間で専用の行動モデルを構築できるとすれば、ROI(投資対効果)の計算可能性が従来に比べ格段に高まる。またソフトウェア的なアップデートでタスクを追加できる柔軟性は、季節変動の激しい現場での運用に適合しやすい。
ロボットメーカーやシステムインテグレーターにとっても、顧客の施設スキャンを起点としたSaaS型の「ロボット行動学習サービス」という新たなビジネスモデルの可能性が開かれる。初期の現場調査コストを抑えつつ、現場固有のデータを継続的に蓄積することで参入障壁を高める戦略も描けよう。
今後の展望
現時点での実証は単一物体の搬送に限定されており、複数物体の同時操作や動的障害物への対応など、実用化に向けた課題は残る。また3D再構築の精度が学習品質に直結するため、スキャン設備やデータ管理体制の整備も導入企業側に求められる。
一方、合成データ生成パイプラインの汎用性は高く、今後は屋外環境や異なるロボット形状への拡張が見込まれる。ヒト型ロボット市場は2030年代に向けて急速に拡大すると予測されており、学習データのボトルネックを解消するVLKのアプローチは、業界標準的な手法として採用される可能性がある。各社は自社施設の3Dデジタル化を早期に進めることが、ロボット活用の競争優位につながると考えられる。
関連トピック
同セクションの記事
モダリティ欠損でもAI認識精度を維持する新技術登場
画像・テキスト・音声などの入力データが最大90%欠損した状況でも高精度な視覚認識を実現するAI技術が発表された。製造・医療・小売など多様な産業で、データ品質に左右されない安定した自動化基盤の構築を可能にする。

手・物体の3D姿勢推定が野外環境で実用域へ
英ブリストル大学などの研究チームが、一人称視点映像から手と物体の3D姿勢を同時推定するトランスフォーマーモデル「HOPformer」を発表。製造・医療・小売など現場作業の分析・自動化に直結する精度水準を達成した。

AIが遮蔽内部まで3D復元、製造・VR産業に波及
テキストや画像から可動部品を持つ3Dオブジェクトを完全復元するAI技術「UnfoldArt」が発表された。内部構造や隠れた形状まで推定できる点が既存技術と一線を画し、製造・小売・XR産業のデジタル化コスト削減に直結する。