歩行中に器用な作業、人型ロボが実現
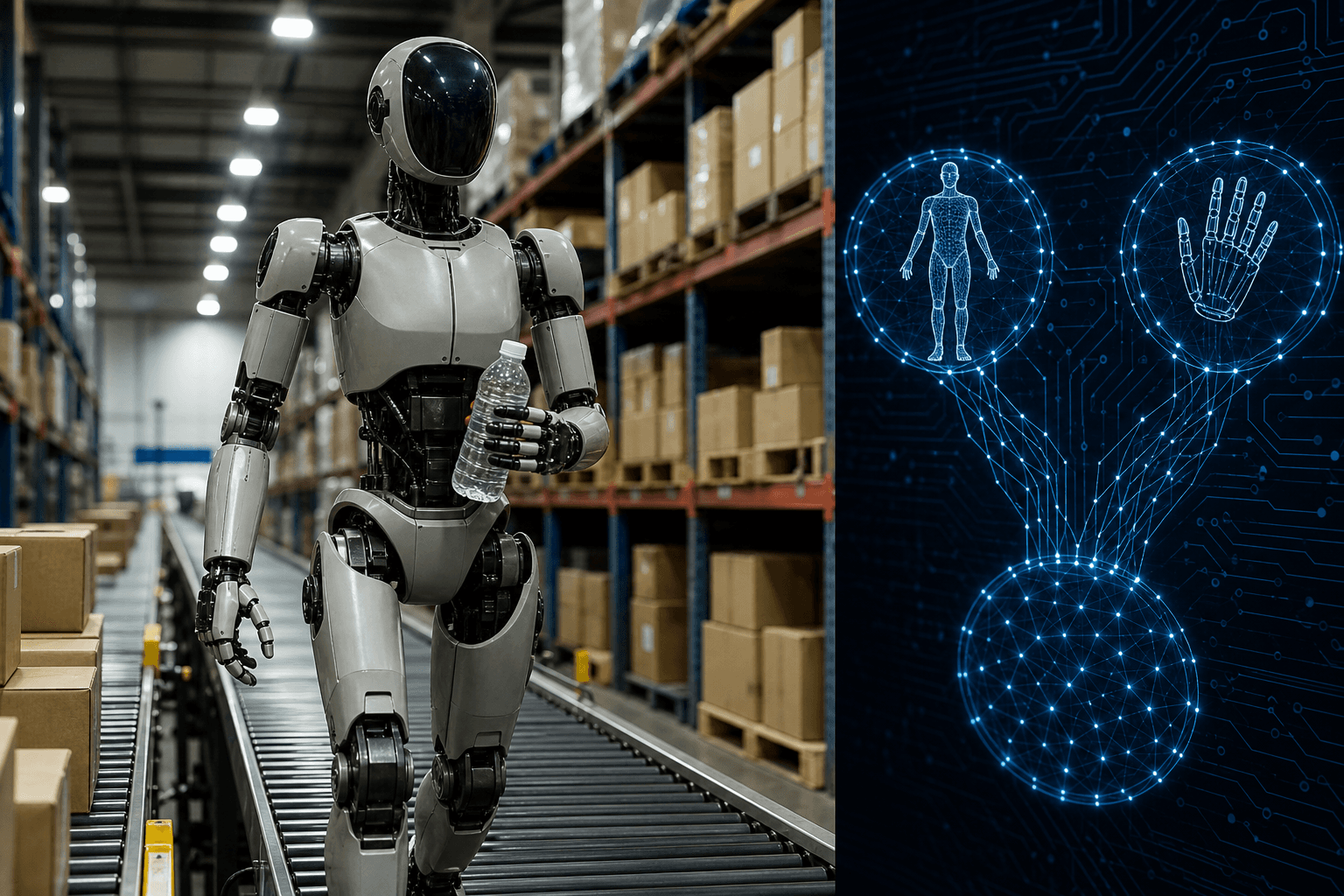
米中研究チームが開発したCoorDexは、人型ロボットが歩きながら瓶をつかみ冷蔵庫を開けるなど高度な手指作業を連続実行できる学習基盤であり、物流・製造・介護分野の自動化投資判断を根本から変える可能性がある。
人型ロボット(ヒューマノイド)の産業活用において最大の制約となってきたのが、「歩行」と「操作」を同時に行えないという構造的限界であった。従来システムはある地点まで移動し、停止して対象物を把持し、再び歩き出すという段階的な動作を前提としており、作業スループットの向上に本質的な天井をもたらしていた。
研究チームが発表したCoorDexはこの制約を学習パイプラインの設計から解決する手法である。胴体全体の動作制御と20自由度の指先制御を、それぞれ独立した潜在空間(ラテント空間)として事前学習し、下流の強化学習がその二つの潜在表現を協調残差制御によって組み合わせる構造を採用する。具体的には、シミュレーション上の全身・手指モーションデモンストレーションから特権情報付き教師エージェントを訓練し、固有感覚のみを入力とする潜在事前分布へと蒸留する。この凍結された事前分布をアクション空間として用いることで、接触が密に発生する高次元制御を現実的な計算コストで学習可能にした。
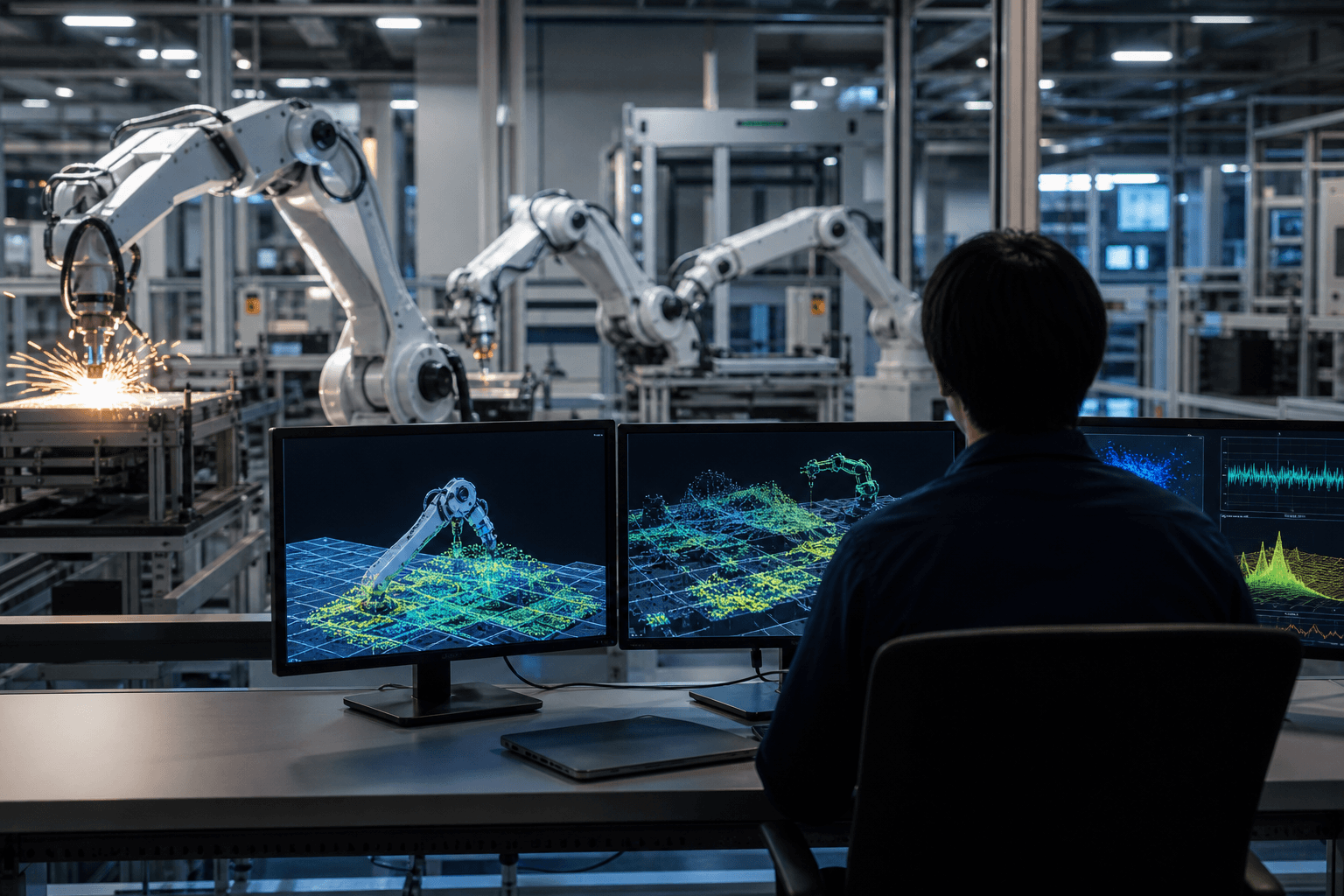
実機検証にはUnitree G1ヒューマノイドとWUJIハンドが用いられ、歩行中の瓶把持・搬送、移動中の冷蔵庫ドア開閉、立方体の把持と回転操作が連続実行された。アブレーション実験では、同一の報酬設計のもとで従来手法である関節空間PPOや単一潜在予測がいずれも失敗したのに対し、CoorDexの潜在事前インターフェースと協調残差構造が有効であることが確認された。
ビジネス上の含意は複数の産業セクターに及ぶ。物流・倉庫管理分野ではピッキングから搬送までの工程を途切れなく実行できるため、ユニットあたりの作業時間(タクトタイム)の大幅短縮が見込まれる。現状の固定アームロボットが担えない棚間移動を伴う多品種少量ピッキングへの適用余地は大きく、Eコマース企業のフルフィルメントセンターにおける人件費比率や誤出荷率といったKPIに直結する。
製造業では組立ラインの柔軟性が焦点となる。専用治具や固定式アームを前提とするラインは段取り替えコストが高いが、歩行中に精密作業を行えるヒューマノイドはレイアウト変更不要のまま多品種対応を実現する可能性がある。特に少量多品種生産を特徴とする航空宇宙・精密機器部品の組立工程において、設備投資回収期間の短縮効果が期待される。
介護・医療分野では薬品や食事トレーの運搬と配膳を同一動作で完結させる活用シナリオが想定される。スタッフ一人あたりの対応患者数や夜間見守りの省力化指標が改善対象となり、慢性的な人手不足への対応策として施設運営コストの構造改善につながる。
サプライチェーン管理部門にとってはロボット調達判断の評価軸が変わる点も重要である。従来は自由度(DoF)数や最大ペイロードが主要スペックであったが、CoorDexが示す「連続タスク実行率」と「移動中の接触成功率」が新たなKPI候補となり、ベンダー選定基準の刷新を迫る。
課題も残る。現状の検証はシミュレーションから実機への転移(sim-to-real)の範囲に限定されており、不特定多数の物体形状・重量・表面材質への汎化性能は未検証の部分が多い。安全規格への適合やデュアルユース懸念を踏まえた導入審査プロセスの整備も産業実装の前提条件となる。研究チームは今後、より複雑な環境構造や複数ロボット協調への拡張を見据えており、ヒューマノイド商業化の時間軸を左右する基盤技術として産業界の注目が高まっている。
関連トピック
同セクションの記事
自己選別AIがデータ品質問題を解決
カナダの研究チームが、人手を介さずにAI自身がトレーニングデータを自動精製する手法を開発した。大規模マルチモーダルAI開発のコスト構造を根本から変える可能性がある。

AIが生垣を国土規模で自動検出、農業・保険業に変革
フランスの研究チームが衛星画像から生垣を自動検出するAIベンチマーク「Hedgementation」を公開した。農地管理の効率化や生態系サービスの定量評価に道を開く成果として注目される。
産業ロボットの自律学習、効率化へ前進
米研究者らがロボットの視覚・言語・行動モデルに能動的継続学習を組み合わせた手法「RECALL」を発表。失敗前に補完データを収集し、再訓練コストを削減できることが実証された。