遮蔽下でも腕動作を正確再現、低コスト遠隔操作技術が登場
シンガポール国立大学らの研究チームが、単一カメラで人間の腕動作を遮蔽環境下でも高精度に捕捉する「腕運動学補正(AKC)」手法を発表した。製造・医療・物流分野における遠隔ロボット操作の実用化コストを大幅に引き下げる可能性がある。
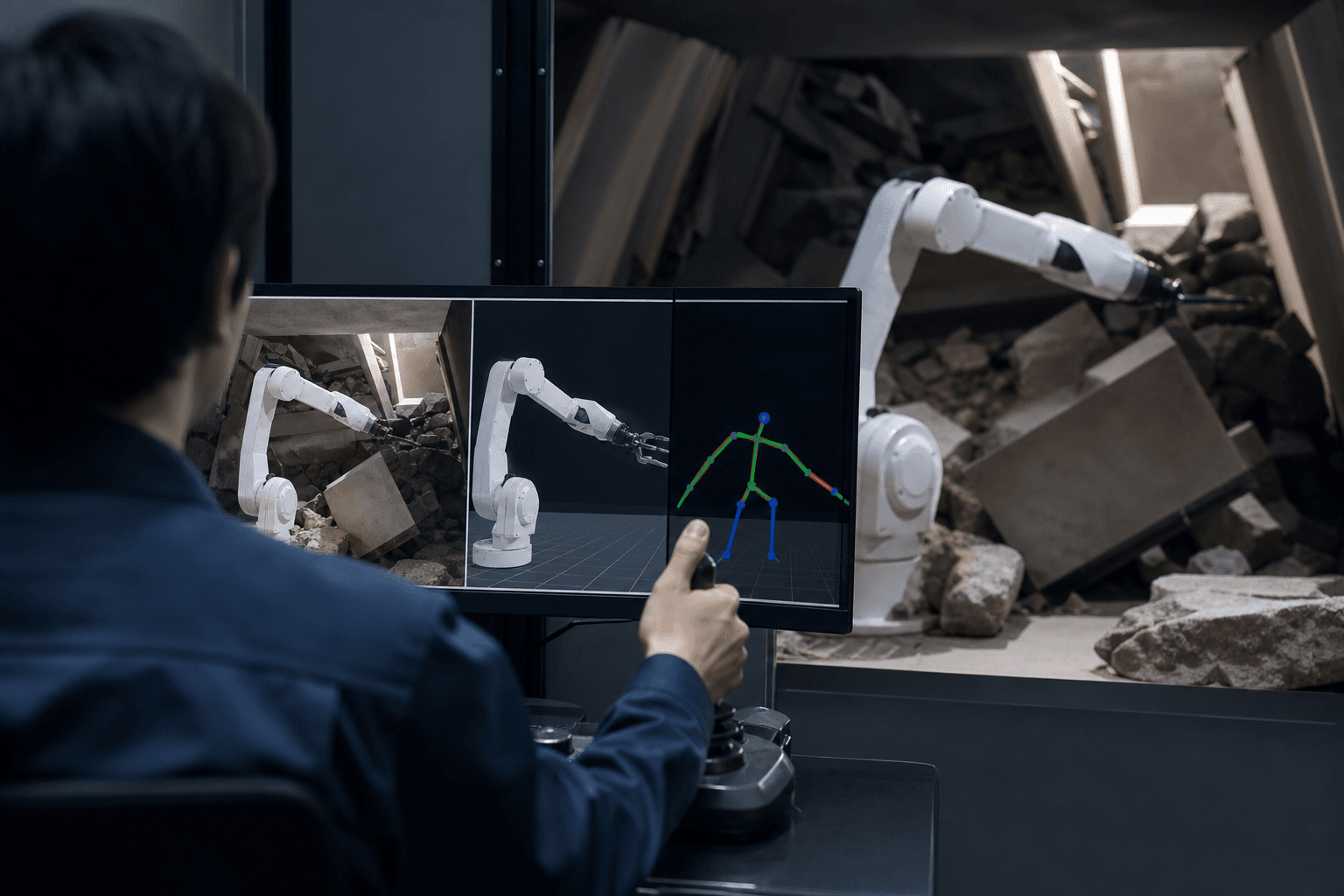
ロボット遠隔操作における最大の技術的障壁の一つが、オペレーターの腕が自身の体に隠れる「自己遮蔽」問題である。従来のモーションキャプチャシステムは身体にマーカーを装着する必要があり、導入コストが高く、作業者への負担も大きかった。今回発表された腕運動学補正(AKC)手法は、市販のRGB-Dカメラ一台と幾何学的制約のみを用いて、この課題を確定的アルゴリズムで解決するものである。
手法の核心は単純かつ堅牢な原理に基づく。人間の上腕と前腕の長さは生理的に一定であるという解剖学的制約を利用し、手首位置と既知のアーム長からピタゴラスの定理を応用して遮蔽された関節の深度を逆算する。複雑な確率モデルや機械学習による大量データ学習を必要とせず、パラメータ調整も最小限で済む点が、産業現場への即時適用を容易にする。検証実験では高精度モーションキャプチャシステム「Vicon」を参照基準として採用し、静止状態・動的動作の双方においてRMSE(二乗平均平方根誤差)とピアソン相関係数で良好な成績を確認した。また、シミュレーター環境と実機ロボット双方での遠隔操作デモンストレーションにも成功している。
ビジネス上の影響は複数の産業セクターに及ぶ。製造業では、溶接や精密組み立てなど危険・高難度工程の遠隔化が現実味を帯びる。従来のモーションキャプチャ設備は数百万円規模の初期投資を要したが、AKCはRGB-Dカメラの追加のみで導入可能なため、中小製造業の設備投資負担を抑制しながら省人化KPIの達成を支援する。生産現場の稼働率や不良品率といった製造KPIへの貢献が期待される。
医療・介護分野では、遠隔手術支援や放射線環境下での処置補助への応用が見込まれる。手術ロボット操作における医師の動作忠実度は患者安全に直結する指標であり、遮蔽環境でも動作精度を維持できるAKCは手術精度KPIの向上に寄与し得る。また、介護ロボットのリモート操作に活用すれば、介護職員の身体的負担を示す労働災害件数の削減にも貢献できる。
物流・倉庫分野においても、狭隘な棚間での作業や危険物取り扱いを遠隔化する需要が高まっている。ピッキング作業の自動化が困難な不定形商品の取り扱いにオペレーター遠隔操作を組み合わせるハイブリッドモデルへの適用が考えられ、作業スループットや誤出荷率などの物流KPI改善につながる可能性がある。
システム統合の観点では、既存のロボットアームやテレプレゼンスプラットフォームへの組み込みが容易な点も評価できる。アルゴリズムが確定的であるためリアルタイム処理の遅延が小さく、クラウド処理に依存しないエッジ運用も可能である。これはサイバーセキュリティリスクを低減したいインフラ・防衛関連企業にとっても魅力的な特性となる。
今後の課題としては、複数人が同時に作業する環境での骨格検出精度の維持や、より複雑な上半身動作への対応拡張が挙げられる。研究チームは現時点で上肢動作に限定しているが、下肢や体幹への手法拡張が実現すれば全身遠隔操作ロボットへの道が開ける。産業界はこの技術をパイロット導入し、現場固有の遮蔽パターンに対する性能評価を早期に着手することが競争優位の確保につながるであろう。
関連トピック
同セクションの記事
FPGAがAIエージェントの安全協調を保証
自律AIシステムの協調制御をFPGAハードウェアに実装し、決定論的な安全保証を実現する新アーキテクチャが提唱された。ソフトウェア依存では困難だったリアルタイム安全保証の壁を破る可能性があり、製造・医療・自動運転など安全最優先産業への波及効果が大きい。

画像セットからAIが概念推論、VLM新技術が登場
テキスト説明なしに複数の画像例からビジュアル概念を自動推論するAI技術「VICIS」が発表された。製造業の品質検査からファッションのデザイン生成まで、視覚的文脈理解を必要とする業務の自動化を大きく前進させる可能性がある。

AIの行動計画精度を向上、新手法ACIDが登場
ロボット制御や自律エージェントの計画精度を高める新技術「ACID」が発表された。製造・物流・医療分野でのロボット導入コスト削減と信頼性向上に直結する可能性がある。
