少数デモでロボット汎化、R2RDreamerが製造業を変革
清華大学らの研究チームが開発したR2RDreamerは、少数の実演データからロボット操作ポリシーの空間汎化を実現する拡張フレームワークであり、産業用ロボット導入コストを大幅に削減する可能性を持つ。
清華大学を中心とする研究グループは、ロボット操作学習における「空間汎化」の課題を解決するデータ拡張フレームワーク「R2RDreamer」を発表した。同手法は少数の実演デモンストレーションから、物体の配置・カメラ視点・ロボット姿勢が異なる多様な学習データを自動生成するものであり、実用的なロボット導入を阻む主要障壁の一つを取り除くことが期待される。
従来のロボット模倣学習では、ロボットが新しい環境や物体配置に対応するために大量の実演データを収集する必要があった。人間の作業者が物体の位置や向きを変えながら何十回・何百回とデモンストレーションを繰り返す作業は、時間とコストの両面で企業にとって大きな負担であった。シミュレーション環境で学習データを生成する方法も存在するが、仮想環境と現実のギャップ(Sim-to-Realギャップ)により、実機での性能が劣化するという問題が残っていた。
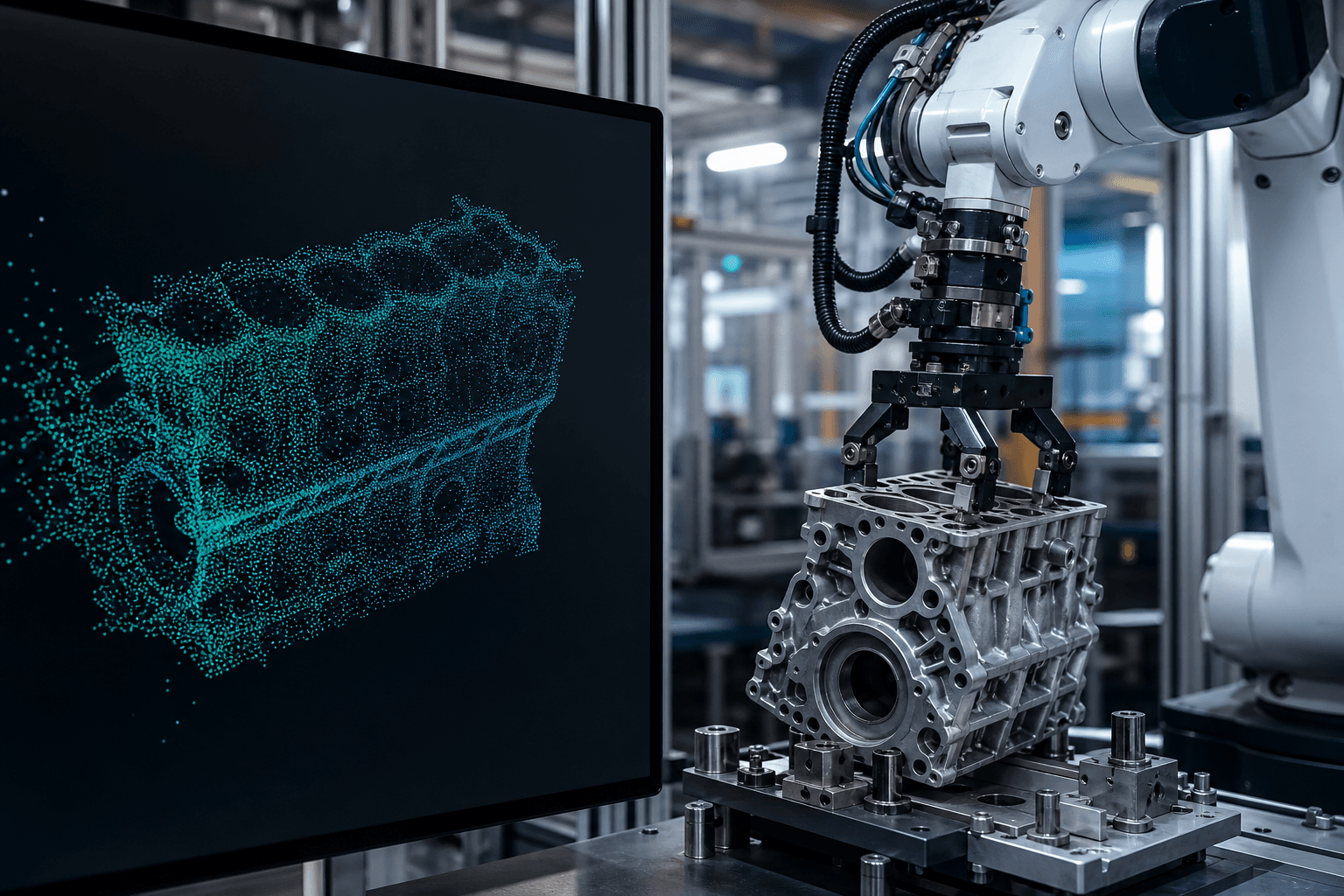
R2RDreamerが採用するのは「実環境から実環境へ(Real-to-Real)」のデータ拡張手法である。具体的には、実際のデモンストレーションから取得した物体の三次元点群データとエンドエフェクタの軌跡を3D空間上で軽量に編集し、異なる物体配置や視点に対応した新しいシーンを生成する。次に、オクルージョン(遮蔽)を考慮しながら編集済みシーンを二次元のマスク動画に投影し、画像から動画を生成するAIモデルを用いて時間的に整合したRGB映像として補完する。この二段階のパイプラインにより、幾何学的整合性を保ちながら、既存手法が苦手とするRGBカメラ入力に基づく2次元操作ポリシーにも対応可能となった。
ビジネスへの影響は製造業・物流・小売の三分野で特に大きい。製造業の生産技術部門では、新たな部品形状や組み付け工程が発生するたびに必要となるロボット再教示の工数を削減できる。従来は数週間を要した工程変更対応が数日に短縮される可能性があり、段取り替え時間(チェンジオーバータイム)というKPIの改善に直結する。物流センターの自動化推進部門では、サイズ・形状が多様なパッケージのピッキング成功率向上が見込まれ、誤ピッキング率の低減が期待できる。小売業においても店舗での陳列ロボット導入時に、SKUごとの個別デモ収集コストが大幅に抑えられる。
R2RDreamerが特筆すべき点は、拡散モデルベースのポリシーと視覚言語行動(VLA)モデルの双方に対して有効性が確認されている点である。これは特定のロボット制御アーキテクチャに依存しない汎用性の高さを示しており、既存のロボットシステムへの導入障壁が低い。企業のロボット化推進担当者にとっては、現行システムを大きく刷新することなく恩恵を受けられることを意味する。
課題も残る。現段階では点群データの取得に深度センサーが必要であり、RGBカメラのみの環境では適用範囲が限定される。また、ビデオ生成モデルによる映像補完の品質は、物体の素材や照明条件によって変動するため、鏡面反射素材や複雑な照明下での安定性検証が今後の研究課題となる。
産業用ロボット市場が拡大を続ける中、ロボット導入コストの大宗を占める「ティーチング工数」の削減は業界全体の懸案事項である。R2RDreamerのような少数デモからの高品質データ拡張技術は、ロボットSIer(システムインテグレーター)各社のサービス提供モデルにも影響を与えうる。実証実験から商用実装への移行期にある企業は、本技術の動向を注視する必要がある。
関連トピック
同セクションの記事
FPGAがAIエージェントの安全協調を保証
自律AIシステムの協調制御をFPGAハードウェアに実装し、決定論的な安全保証を実現する新アーキテクチャが提唱された。ソフトウェア依存では困難だったリアルタイム安全保証の壁を破る可能性があり、製造・医療・自動運転など安全最優先産業への波及効果が大きい。

画像セットからAIが概念推論、VLM新技術が登場
テキスト説明なしに複数の画像例からビジュアル概念を自動推論するAI技術「VICIS」が発表された。製造業の品質検査からファッションのデザイン生成まで、視覚的文脈理解を必要とする業務の自動化を大きく前進させる可能性がある。

AIの行動計画精度を向上、新手法ACIDが登場
ロボット制御や自律エージェントの計画精度を高める新技術「ACID」が発表された。製造・物流・医療分野でのロボット導入コスト削減と信頼性向上に直結する可能性がある。
