単眼カメラで高精度3D再構成、新AI手法が登場
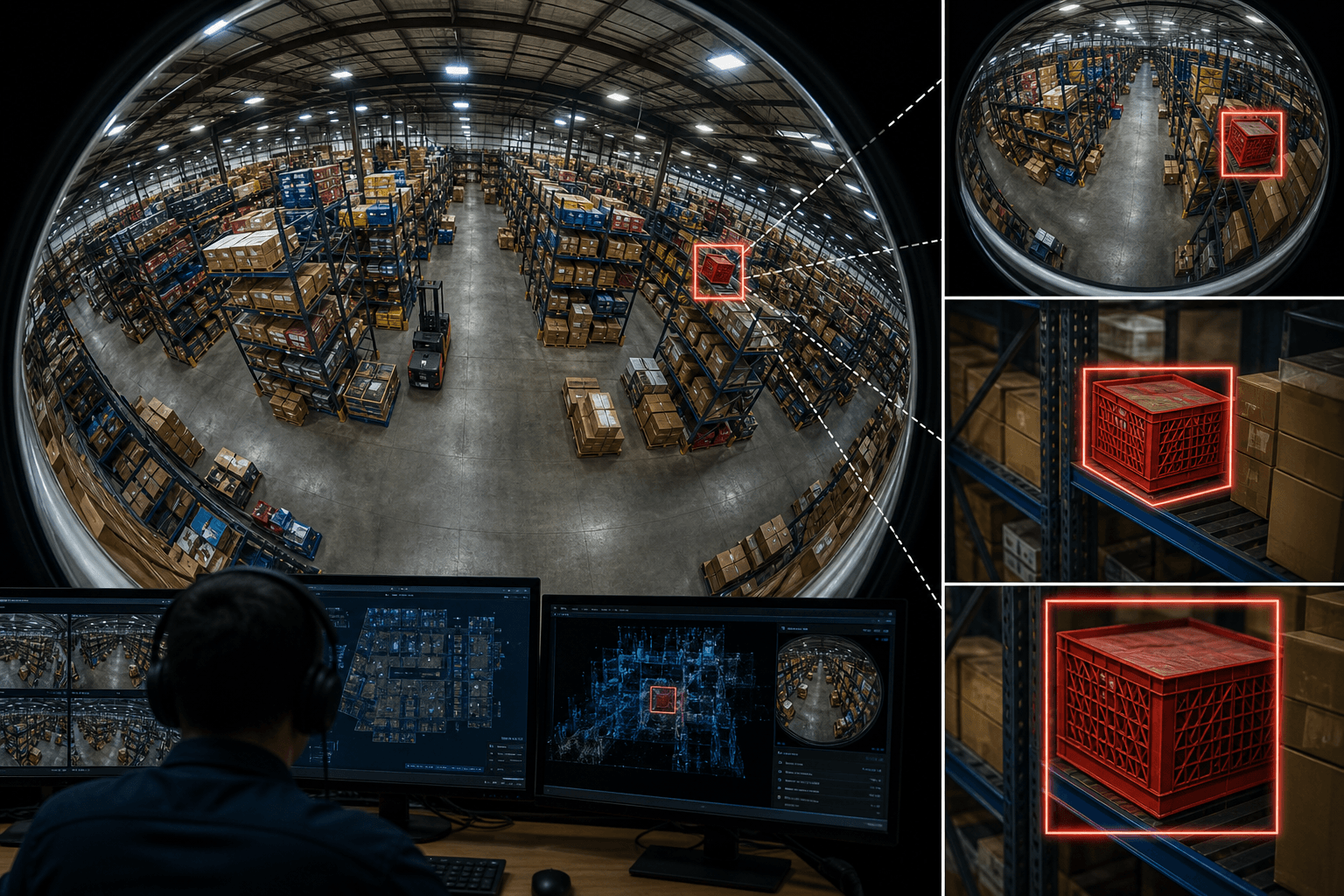
Googleらの研究チームが、単一画像から3D形状を高精度に推定する新手法「PointDiT」を発表した。既存の複雑なモデルを凌駕しつつ構造を大幅に簡素化しており、製造・小売・建設など幅広い産業でのコスト削減が期待される。

研究の概要
複数の大学・企業の研究者が共同で開発したPointDiTは、通常のカメラで撮影した1枚の静止画像から、シーン全体の3次元幾何構造を推定する拡散モデルである。
従来手法の多くは、潜在空間への圧縮処理や複雑な損失関数の組み合わせを必要とするハイブリッドアーキテクチャに依存していた。これに対しPointDiTは、Vision Transformer(ViT)をベースとしたシンプルなピクセル空間拡散モデルを採用し、3Dポイントマップのパッチを直接処理する。事前学習済みの画像エンコーダ「DINOv2」から得た画像トークンを条件として付与することで、複雑な設計を排除しながらも高い精度を実現した。
特筆すべき点は、透明物体や鏡面反射など幾何的に曖昧な領域においても安定した推定が可能である点だ。既存の潜在拡散モデルと比較して幾何構造の鮮明さが向上しており、実世界の複雑なシーンへの適用可能性が高まっている。
ビジネスへの示唆
この技術が実用化された場合、特に以下の分野・部門で直接的な影響が見込まれる。
- 製造・品質管理部門:ラインカメラ1台で部品の3D形状検査が可能となり、高価な専用3Dスキャナの導入コストを削減できる。不良品検出率(検出精度KPI)の向上が期待される。
- EC・小売業のマーケティング部門:商品写真1枚から3Dモデルを自動生成し、AR試着・試置きコンテンツの制作コストを大幅に圧縮できる。商品ページの直帰率改善やコンバージョン率(CVR)向上への貢献が見込まれる。
- 建設・不動産業の設計部門:現場写真から空間の3D計測データを即時生成することで、現地測量の工数削減と施工計画の精度向上が図れる。測量作業の人件費削減率が主要なKPIとなろう。
- 自動運転・物流ロボティクス部門:単眼カメラセンサー構成で十分な奥行き推定が実現できれば、LiDARなど高コストセンサーの代替・補完として機能し、車両・ロボット1台あたりのハードウェアコスト削減に直結する。
透明物体への対応強化は、ガラス製品の検品や化学・医薬品業界での液体容器管理といったニッチかつ高付加価値な用途においても差別化要因となる。
今後の展望
本手法の最大の強みは、そのシンプルな設計にある。モデルの学習コストや推論コストを抑えやすい構造であるため、クラウドAPIとしての提供やエッジデバイスへの組み込みが比較的容易と考えられる。スタートアップによるSaaS展開や、既存の画像処理パイプラインへの統合が現実的な選択肢として浮上する。
一方、本研究は静止画を前提としており、動画ストリームへのリアルタイム適用や、屋外大規模シーンでの汎化性能については今後の検証が必要である。各産業への本格実装にあたっては、ドメイン固有のデータによるファインチューニングと、既存の業務フローへの統合コストの評価が実務上の課題となろう。
関連トピック
同セクションの記事
量子メモリ制約が量子AI開発コストを左右する
米IBMら研究者が量子状態の検証・学習に必要なサンプル数をメモリ量の関数として厳密に解明した。量子コンピュータのハードウェア設計と品質管理コストに直結する成果である。
ロボットAI、少量データで高精度動作習得
複旦大学らの研究チームが、高コストな専門家デモデータをほぼ使わずにロボット操作AIを訓練できる「タスク非依存事前学習(TAP)」を発表した。製造・物流業界における自動化コストの大幅削減につながる可能性がある。

360度空間AI探索、精度8倍に向上
東浙大学らの研究チームが開発した「EAGLE-360」は、360度パノラマ映像内での自律的な視覚探索精度をベースモデル比約8倍に高めた。製造・物流・警備など空間監視を要する産業のDX加速に直結する成果である。