AIが360度空間を自律探索、物体特定精度が向上
上海復旦大学などの研究チームが、AIエージェントが360度環境を自律的に視点調整しながら指定物体を探索・セグメント化する新技術「PanoSeeker」を発表した。製造・物流・警備など空間認識が求められる産業での自動化加速が期待される。

研究の概要
従来の画像認識AIは、固定カメラが撮影した静止画を受動的に処理するにとどまっていた。この制約により、ロボットや自律エージェントが実環境で動作する「Embodied AI」への応用には大きな壁があった。
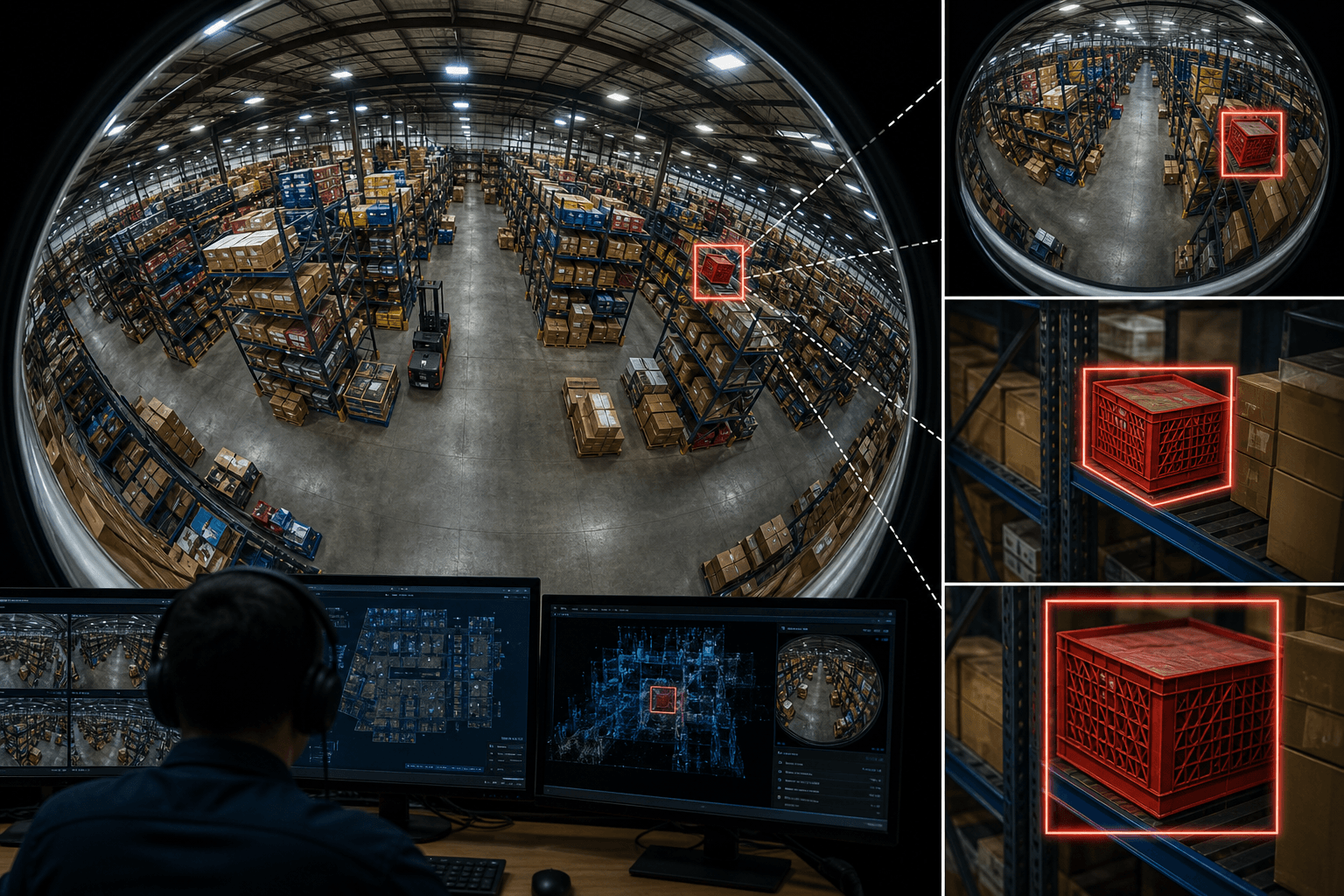
復旦大学などの研究チームが発表したPanoSeekerは、この課題を正面から突破する。AIエージェントが水平・垂直方向の視点角度(Δθ、Δφ)を能動的に調整しながら360度環境を探索し、ユーザーが自然言語で指定した物体を発見・セグメント化する技術である。中核となるのは「EgoSphere」と呼ばれる空間視覚メモリ機構で、エージェントが逐次取得する局所観測を統合し、冗長なスキャンを排除した効率的な探索経路を生成する。
さらに、専門家が注釈を付けた探索軌跡データセットを用いた教師あり微調整に加え、強化学習によるポストトレーニングを実施することで、探索効率と物体セグメント精度の双方を従来手法に対して大幅に向上させた。
ビジネスへの示唆
この技術が商用レベルに達した場合、空間認識を必要とする複数の産業で既存の業務フローを刷新する可能性がある。
製造・倉庫物流では、ピッキングロボットが棚全体を網羅的にスキャンすることなく、作業者の音声指示一つで目的物を即座に特定できるようになる。これによりオーダー処理時間(OTD: Order-to-Delivery)の短縮と、ロボット稼働率の向上が見込まれる。
警備・施設管理の領域では、固定カメラとの連携により、監視オペレーターが自然言語で「赤い荷物を持った人物」などと指示するだけで、AIが全方位映像から該当対象を自律的に捕捉するシステムが実現しうる。警備員一人当たりのモニタリング範囲拡大と、インシデント検知時間(MTTD)の短縮に直結する。
建設・インフラ点検においては、ドローンや点検ロボットが現場担当者の指示に従い、特定の亀裂や設備部品を360度映像の中から能動的に探し出す用途が想定される。点検工数の削減と、見落としリスク低減による品質KPIの改善が期待される。
影響を受ける部門と主要KPIを整理すると以下のとおりである。
- 物流・倉庫部門:ピッキング精度、オーダー処理時間
- 警備・セキュリティ部門:インシデント検知時間(MTTD)、要員配置コスト
- 設備管理・メンテナンス部門:点検工数、不具合見落とし率
- 小売・店舗運営部門:在庫確認時間、欠品検知速度
今後の展望
現時点では研究段階であり、実環境への展開にはリアルタイム処理性能の向上や、多様な照明・遮蔽条件への頑健性確保といった課題が残る。また、自然言語による物体指示の多言語対応も、グローバル展開を目指す企業には不可欠な要素となる。
一方、強化学習による探索効率の最適化という手法は、特定の環境・業務に合わせてモデルをファインチューニングできることを意味する。システムインテグレーターや産業用ロボットメーカーが自社ソリューションに組み込む際の参入障壁は、汎用VLMの普及により相対的に低下しつつある。
空間認識AIの競争が激化する中、能動的な視点制御と言語理解を統合したこのアプローチは、次世代の現場自動化プラットフォームの中核技術として位置づけられる可能性が高い。
関連トピック
同セクションの記事
量子メモリ制約が量子AI開発コストを左右する
米IBMら研究者が量子状態の検証・学習に必要なサンプル数をメモリ量の関数として厳密に解明した。量子コンピュータのハードウェア設計と品質管理コストに直結する成果である。
ロボットAI、少量データで高精度動作習得
複旦大学らの研究チームが、高コストな専門家デモデータをほぼ使わずにロボット操作AIを訓練できる「タスク非依存事前学習(TAP)」を発表した。製造・物流業界における自動化コストの大幅削減につながる可能性がある。

360度空間AI探索、精度8倍に向上
東浙大学らの研究チームが開発した「EAGLE-360」は、360度パノラマ映像内での自律的な視覚探索精度をベースモデル比約8倍に高めた。製造・物流・警備など空間監視を要する産業のDX加速に直結する成果である。