ロボットAI推論を統一基盤で展開
マイクロソフト研究部門らが開発した「Embodied.cpp」は、異種ロボットへの身体化AIモデル展開を単一C++基盤で実現する。製造・物流・医療ロボットの導入コスト削減と展開期間短縮に直結する可能性がある。

研究の概要
ロボット向け身体化AIの実用展開における最大の障壁の一つが、モデルごとに異なるPythonベースのソフトウェアスタックと、デバイス依存の接続コードの氾濫である。研究チームはこの課題を解決するため、C++で記述されたポータブル推論ランタイム「Embodied.cpp」を発表した。
同ランタイムは、視覚・言語・動作を統合したVLA(Vision-Language-Action)モデルと世界モデル型のWAMの双方に対応する。アーキテクチャは「入力アダプター」「シーケンスビルダー」「バックボーン実行」「ヘッドプラグイン」「展開アダプター」の5層構造で設計されており、ハードウェアの違いを単一バックエンド抽象化層で吸収する。
評価実験では、代表的なVLAモデルである「HY-VLA」と「pi0.5」を用いた閉ループ制御において、タスク成功率がそれぞれ100.0%と91.0%を達成した。また、WAMベンチマークではブロックメモリ使用量を312.2MiBから88.1MiBへと約72%削減することに成功している。推論速度を優先した「レイテンシファースト設計」により、エッジデバイス上でのバッチサイズ1推論でも高いリアルタイム性を確保する。
ビジネスへの示唆
今回の技術が持つビジネス上の意義は、ロボット導入における「統合コスト」の抜本的削減にある。現状、企業がロボットシステムを拡張する際には、機種ごとに推論環境を個別構築する必要があり、エンジニアリングコストと検証工数が膨大になる。Embodied.cppはこの非効率を解消する共通基盤として機能しうる。
影響を受ける業種・部門・KPIは以下のとおりである。
- 製造業(生産技術部門): 多関節アームや協働ロボットへのAIモデル展開期間を短縮。ライン切替時のダウンタイム削減に直結する。
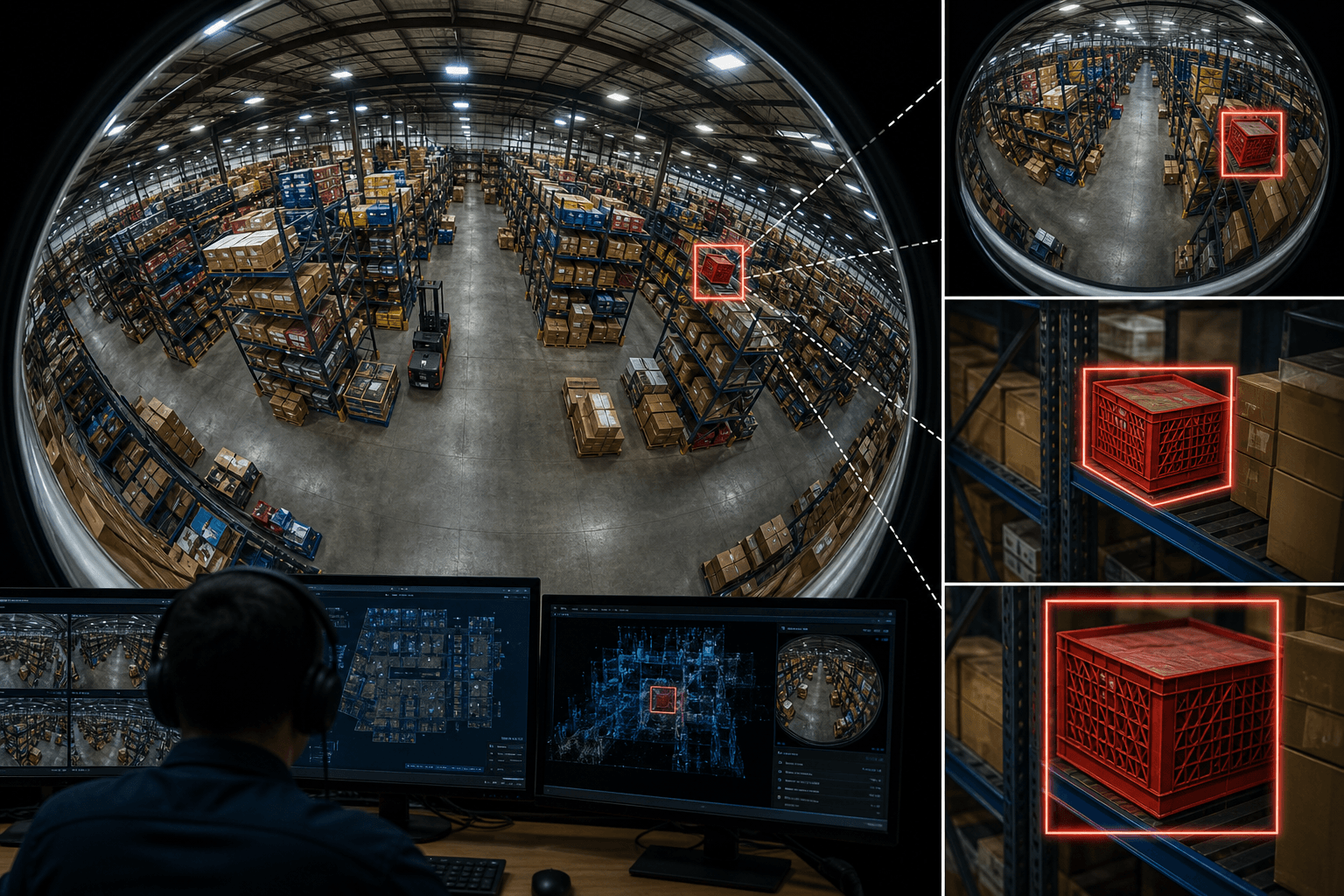
- 物流・倉庫業(オペレーション部門): 異なるメーカーのAMR(自律移動ロボット)への統一展開が可能になり、ピッキング正確率や稼働率向上が期待される。
- 医療・介護(システム導入部門): 手術支援ロボットや搬送ロボットにおいて、エッジ推論の低遅延化が安全性指標(インシデント発生率)の改善に寄与しうる。
- ロボットSIer・ベンダー(開発部門): 顧客ごとのカスタムスタック開発を削減でき、受託開発の工数原価率改善につながる。
特に注目すべきは、メモリ削減効果がエッジデバイスの選定自由度を高める点である。高価なGPU搭載機に依存せず、安価な組み込みチップでも高精度なAI推論を実行できれば、ロボット1台あたりのハードウェアコストを大幅に圧縮できる可能性がある。
今後の展望
身体化AIは、大規模言語モデル(LLM)の進化と連動しながら急速に高度化している。VLAモデルの多様化が加速する中、ランタイムの標準化は産業界にとって不可欠な基盤整備となる。Embodied.cppのようなオープンなアーキテクチャが広く採用されれば、ロボットAIのエコシステムはスマートフォン向けOSの普及時と類似した「プラットフォーム競争」へと移行する可能性がある。
一方、現時点では評価対象モデルが限定的であり、実環境での耐久性や安全認証への対応は今後の課題として残る。製造業や医療分野での本格導入には、IEC 61508やFDA規制に準拠した検証プロセスとの統合が求められることになる。企業の情報システム部門およびロボット調達部門は、標準化動向を注視しながら自社のロボットフリートへの適用可能性を早期に検討することが求められる。
関連トピック
同セクションの記事
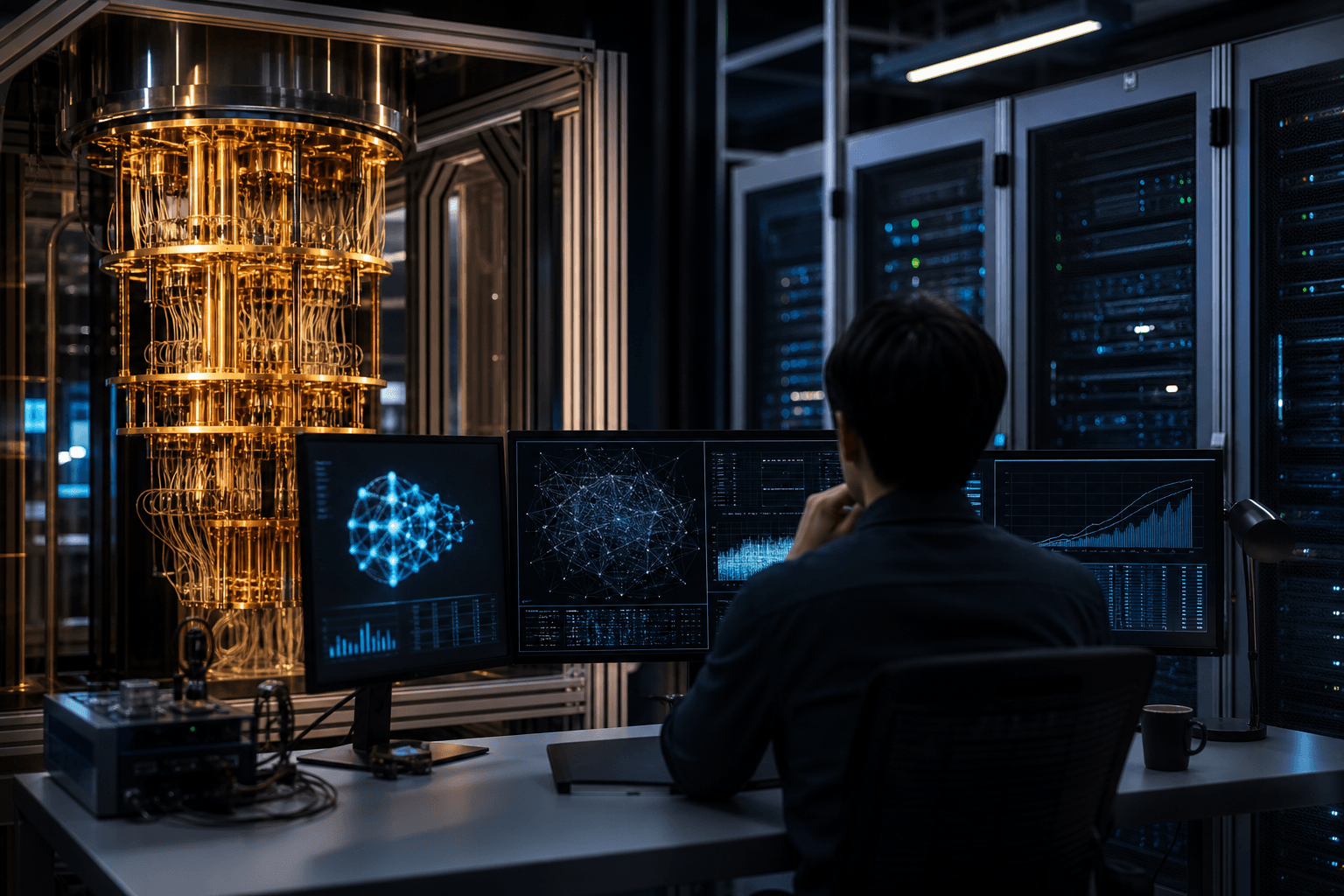
量子メモリ制約が量子AI開発コストを左右する
米IBMら研究者が量子状態の検証・学習に必要なサンプル数をメモリ量の関数として厳密に解明した。量子コンピュータのハードウェア設計と品質管理コストに直結する成果である。
ロボットAI、少量データで高精度動作習得
複旦大学らの研究チームが、高コストな専門家デモデータをほぼ使わずにロボット操作AIを訓練できる「タスク非依存事前学習(TAP)」を発表した。製造・物流業界における自動化コストの大幅削減につながる可能性がある。

360度空間AI探索、精度8倍に向上
東浙大学らの研究チームが開発した「EAGLE-360」は、360度パノラマ映像内での自律的な視覚探索精度をベースモデル比約8倍に高めた。製造・物流・警備など空間監視を要する産業のDX加速に直結する成果である。