AI交通シミュレーション、挙動制御を実現
米研究チームが自動運転テスト向けの新AI「CNeVA」を発表。シミュレーション内の仮想エージェントの速度・安全性・走行ルール遵守を独立に制御できる能力が、自動車メーカーや保険会社の開発コスト削減に直結すると注目されている。

研究の概要
ウェイモ社の公開モーションデータセット(Waymo Open Motion Dataset)を用いた検証で、米研究チームはControllable Neural Variational Agents(CNeVA)と呼ぶ新しい交通シミュレーション手法を提案した。
従来の模倣学習型モデルは実際の走行ログを高精度に再現できる一方、「速度をどの程度に設定するか」「どの程度リスクを許容するか」といった行動パラメータを事後的に操作する手段を持たなかった。CNeVAはこの課題を解決し、エージェントごとに潜在変数(behavior latent)を推定することで、速度・加速度・安全余裕・地図ルール遵守といった複数の行動軸を独立して調整可能にした。
技術的な特徴として、報酬信号が希薄な状況でも勾配情報を維持する「ソフト適格ゲート」機構を導入している。従来の二値的な閾値判定をなだらかな指数減衰関数に置き換えることで、境界付近のエージェントが学習から脱落する問題を回避した。ベンチマーク上のリアリズム指標では上位の模倣学習モデルに競合する水準を達成しつつ、行動制御性において明確な優位性を示した。
ビジネスへの示唆
本技術が最も直接的な影響を与えるのは、自動運転システムの仮想検証プロセスである。現在、自動車メーカーおよびTier1サプライヤーの安全検証部門は、実路試験だけでは統計的に十分なエッジケースを収集できないという構造的課題を抱えている。CNeVAを用いれば、「前方車両が急減速しながら車線変更する」といった特定の危険シナリオを意図的に生成・再現できるため、以下のKPI改善が期待される。
- 仮想走行距離あたりのシナリオカバレッジ率の向上
- 実路試験依存コストの削減(走行1kmあたりの検証費用)
- 安全認証取得期間の短縮(ISO 26262、UN-R157対応)
保険業界においても応用余地は大きい。損害保険会社のリスクモデリング部門は、事故発生頻度の統計モデルを精緻化する際に、実際の事故データのみに依存してきた。本フレームワークを用いた合成事故シナリオの大規模生成は、テレマティクス保険の損害率(ロスレシオ)予測精度の向上に貢献しうる。
また、都市交通シミュレーションを手がけるスマートシティ関連企業にとっても、行動制御可能な仮想エージェントは信号制御アルゴリズムや道路設計の最適化に不可欠なテストベッドとなる。交通管制システムベンダーは、交差点通過効率やヒヤリハット発生件数を指標とした政策シミュレーションに活用できる。
今後の展望
研究チームは実験において、制御指標の単独評価が「報酬ハッキング」——見かけ上の指標改善が物理的妥当性を犠牲にして達成される現象——を引き起こすリスクを指摘している。これは企業導入時の評価設計において重要な示唆であり、KPI設定には物理的整合性の監視指標を必ず併置する必要がある。
自動運転開発競争が激化する中、シミュレーション品質の差異は実路テスト効率の格差として直接現れる。CNeVAのようなアプローチが商用シミュレーションプラットフォーム(CARLA、SUMO、各社独自環境)に統合されれば、開発サイクルの短縮と安全性向上を同時に追求する標準手法として定着する可能性がある。
関連トピック
同セクションの記事
量子メモリ制約が量子AI開発コストを左右する
米IBMら研究者が量子状態の検証・学習に必要なサンプル数をメモリ量の関数として厳密に解明した。量子コンピュータのハードウェア設計と品質管理コストに直結する成果である。
ロボットAI、少量データで高精度動作習得
複旦大学らの研究チームが、高コストな専門家デモデータをほぼ使わずにロボット操作AIを訓練できる「タスク非依存事前学習(TAP)」を発表した。製造・物流業界における自動化コストの大幅削減につながる可能性がある。

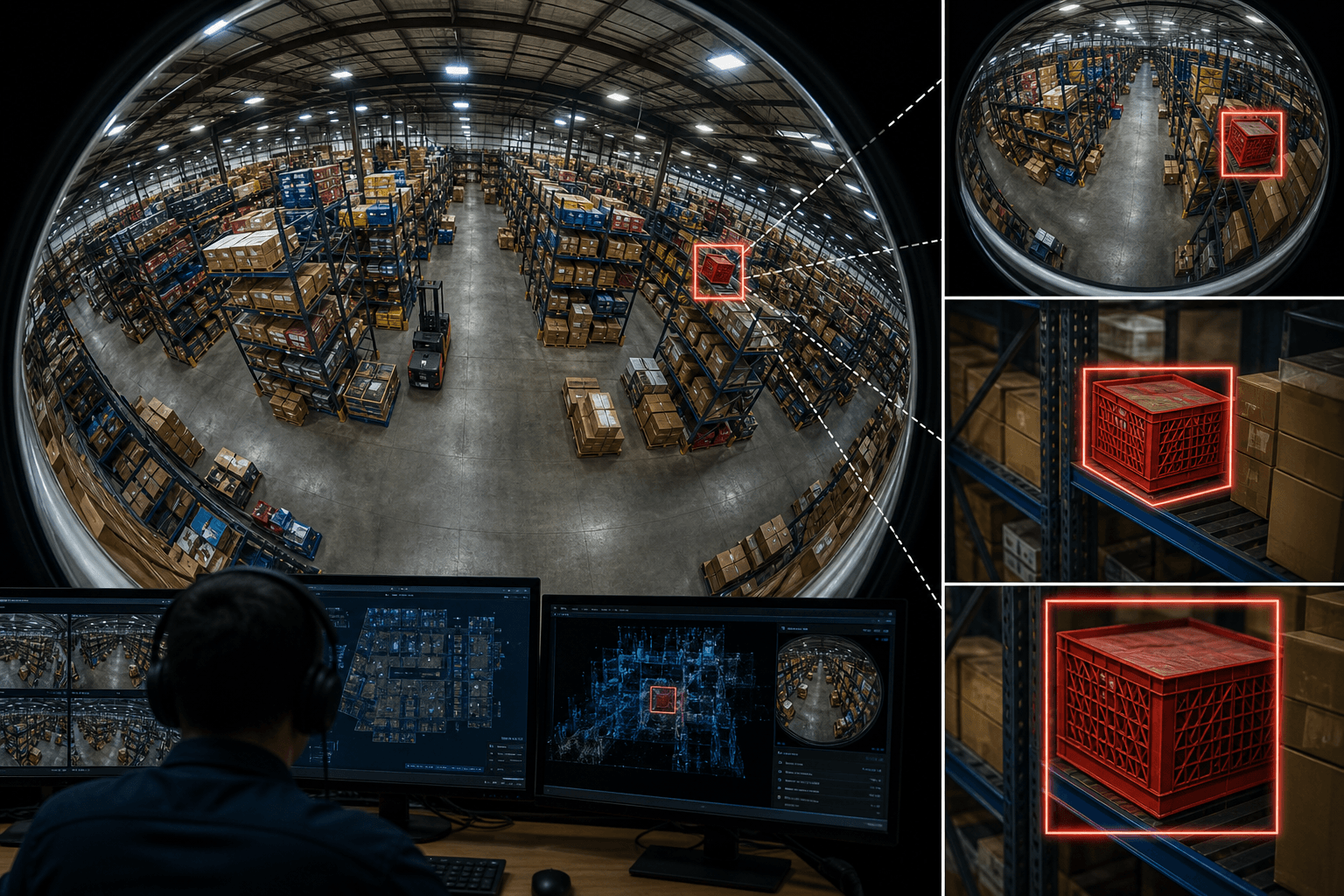
360度空間AI探索、精度8倍に向上
東浙大学らの研究チームが開発した「EAGLE-360」は、360度パノラマ映像内での自律的な視覚探索精度をベースモデル比約8倍に高めた。製造・物流・警備など空間監視を要する産業のDX加速に直結する成果である。