AI画像認識の「文字攻撃」脆弱性、無訓練で防御可能に
画像内の無関係なテキストがAIの視覚認識を誤らせる「タイポグラフィック攻撃」に対し、追加学習なしで防御できる手法が開発された。自動運転や製造ライン検査など安全性が問われる業務への導入障壁が下がる可能性がある。

研究の概要
バージニア大学らの研究チームは、画像認識AIの基盤技術として広く普及するCLIP(Contrastive Language-Image Pretraining)モデルが抱える重大な脆弱性を分析し、追加学習を一切要しない防御手法を発表した。
CLIPは画像とテキストを対応付けて学習するモデルであり、GPT-4VやLLaVAなど最新の大規模視覚言語モデル(LVLM)の視覚エンコーダとして採用されている。しかし、画像内に「バナナ」と書かれた紙をリンゴに貼り付けるだけでモデルの分類結果が変わるなど、**タイポグラフィック攻撃(TA)**と呼ばれる手法で容易に誤認識が引き起こされることが知られている。
研究チームはこの原因をメカニズムレベルで解明するため、視覚トランスフォーマー(ViT)内部の各アテンションヘッドが視覚情報と文字情報のどちらに注目しているかを確率的に定量化する手法を開発した。回路マイニングと呼ばれる分析により、誤認識を引き起こす特定の内部コンポーネントを特定し、そのアテンション重みを選択的に調整するだけで防御効果が得られることを示した。追加の学習データもモデルの再訓練も必要としない点が最大の特徴である。
評価指標であるRIO-Benchの視覚的質問応答(VQA)タスクにおいて、提案手法は既存の教師あり防御手法を上回る精度向上を達成した。
ビジネスへの示唆
この研究が直接的に影響するのは、AIによる視覚認識を安全・品質管理の基軸に置く産業である。
自動車・モビリティ分野では、自動運転システムが道路標識や車体に貼られた偽情報テキストに騙されるリスクが現実の脅威として議論されてきた。本手法はモデルの再展開なしにエンコーダ部分のみ修正できるため、既存システムへの組み込みコストが低く、安全認証取得のための検証工数削減にも寄与する可能性がある。
製造・物流分野においては以下の部門・KPIへの影響が見込まれる。
- 品質管理部門:ラベル誤貼付や異物混入を検知する画像検査システムの誤検知率(False Positive Rate)低減
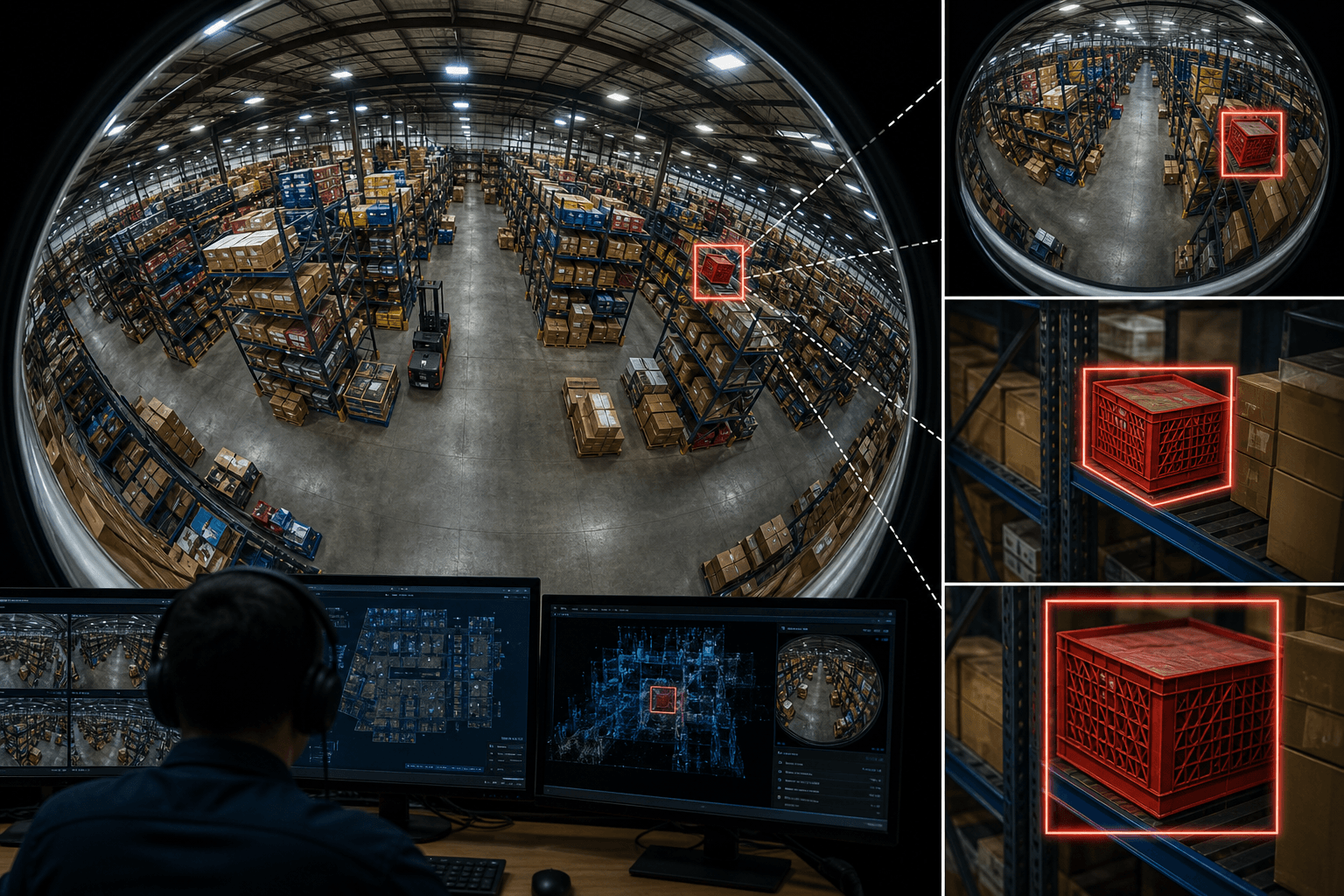
- 倉庫・仕分け部門:商品バーコードや荷札テキストが視覚AIの分類精度を下げる問題の解消による仕分け精度向上
- セキュリティ部門:顔認証や入退管理カメラへの物理的な攻撃(テキスト付き紙の装着など)への耐性強化
小売・EC分野でも、商品画像に不正なテキストを埋め込み推薦アルゴリズムを操作する手口への対策として応用が期待される。マーケティング部門のCTRやコンバージョン率に直結する推薦精度の保護につながる。
再学習が不要という点は、クラウドAPI経由でCLIPベースのサービスを利用する企業にとっても重要である。APIプロバイダーがエンコーダ側で対策を施せば、利用企業はシステム変更なしに恩恵を受けられる。
今後の展望
研究コードはGitHub上で公開されており、企業や研究機関による検証・実装が即座に可能な状態にある。ただし、現時点での評価は物体分類とVQAタスクに限定されており、動画ストリームや複合的な自然言語推論が求められる実業務への汎化性能については引き続き検証が必要である。
AI規制の観点からも注目に値する。EUのAI法(EU AI Act)はハイリスクAIシステムに対してロバスト性の担保を義務付けており、自動運転や医療診断への適用を検討する企業にとって、本手法のような説明可能かつ再現性のある防御機構の存在はコンプライアンス対応の選択肢を広げるものとなる。
CLIPを基盤とするマルチモーダルAIの採用が加速する中、視覚エンコーダの堅牢性確保はシステム全体の信頼性を左右する根幹の課題である。追加コストなしで既存モデルを強化できるこのアプローチは、AI投資対効果(ROI)を重視する企業経営層にとっても評価に値する成果といえる。
関連トピック
同セクションの記事
量子メモリ制約が量子AI開発コストを左右する
米IBMら研究者が量子状態の検証・学習に必要なサンプル数をメモリ量の関数として厳密に解明した。量子コンピュータのハードウェア設計と品質管理コストに直結する成果である。
ロボットAI、少量データで高精度動作習得
複旦大学らの研究チームが、高コストな専門家デモデータをほぼ使わずにロボット操作AIを訓練できる「タスク非依存事前学習(TAP)」を発表した。製造・物流業界における自動化コストの大幅削減につながる可能性がある。

360度空間AI探索、精度8倍に向上
東浙大学らの研究チームが開発した「EAGLE-360」は、360度パノラマ映像内での自律的な視覚探索精度をベースモデル比約8倍に高めた。製造・物流・警備など空間監視を要する産業のDX加速に直結する成果である。