ロボット把持データ収集を自動化、生産性4.8倍
ソウル大学などの研究チームが開発した自動データ収集システム「AutoDex」が、ロボットの巧みな把持動作に必要な実世界データの収集コストを大幅に削減し、製造・物流業界における多指ロボットハンドの実用化を加速させる可能性を示した。

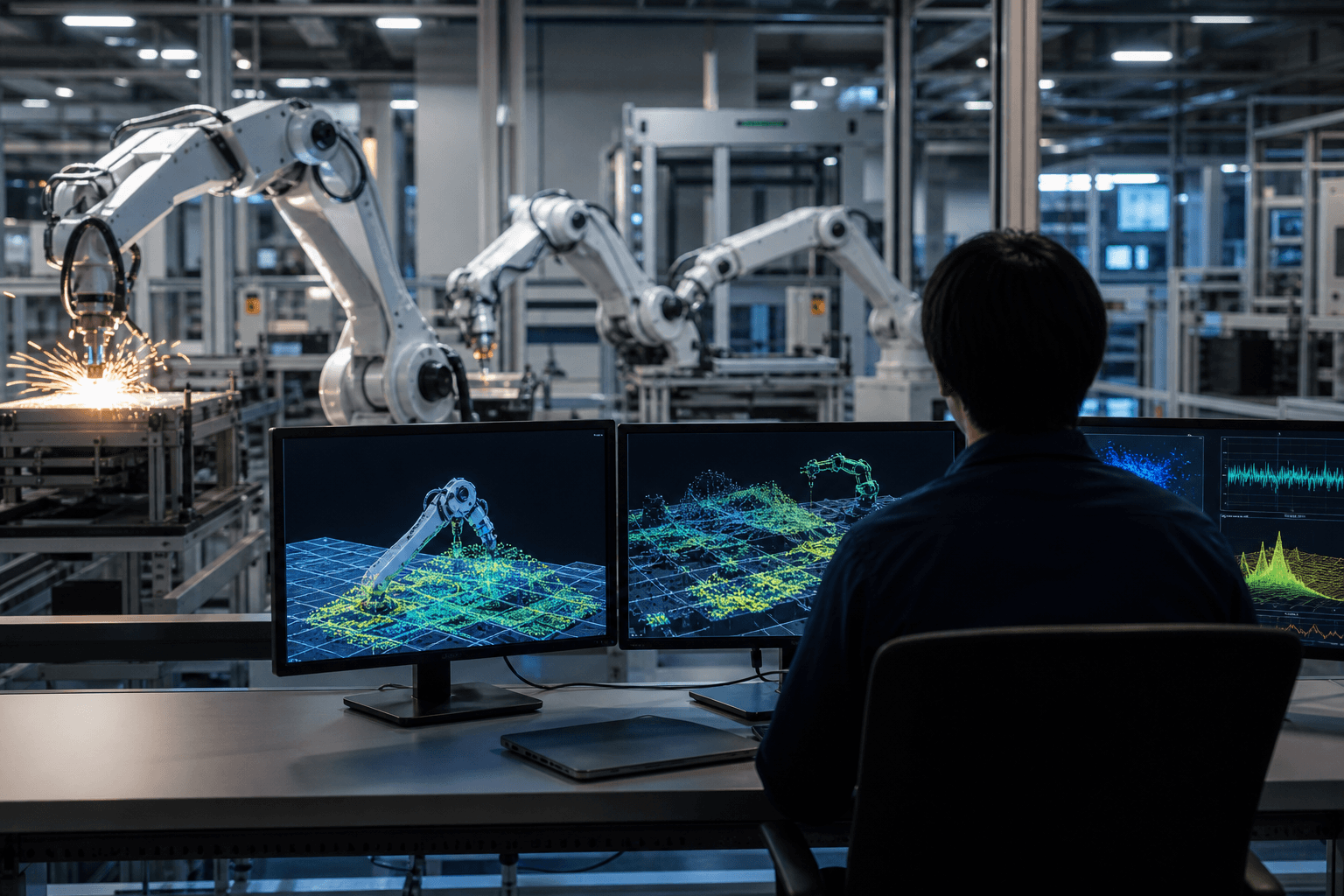
ソウル大学のMingi Choiらの研究チームは、多指ロボットハンドによる把持動作のための実世界データ収集を完全自動化するシステム「AutoDex」を開発し、論文を公開した。同システムは、候補動作の生成から実行・成否判定・物体リセットまでの一連のループを人手不在で完結させるもので、従来の遠隔操作と比較してデータ収集のスループットを4.8倍に向上させることが実証された。
ロボットが人間の手のように複雑な形状の物体を把持するためには、実際の物理的な接触結果を記録した大量のデータが不可欠である。しかし、従来の主要な手法には根本的な課題があった。熟練オペレーターによる遠隔操作はリアルな物理データを得られる一方で、時間とコストがかかりオペレーターの癖に偏ったデータになりやすい。一方、シミュレーション上での大規模生成は安価だが、実際の接触の有効性を保証できず、現実環境では成功率が低下する問題があった。
AutoDexはこの課題に対し、20台のカメラによる密な多視点認識システムを採用することで、手が物体を覆う際の深刻な遮蔽問題を克服する。ロボットの動作中は衝突を常時監視し、把持試行の成否を自律的に判定した後、物体を能動的にリセットして次の試行に備える。同チームはAllegroとInspireの2種類のロボットハンドを用いて100種類の多様な物体に対し3,593件の把持試行を収集した。同一500軌跡の収集に要した時間は、AutoDexが10.3時間であるのに対し遠隔操作では49.4時間を要した。さらに決定的な成果として、AutoDexが検証したデータベースから取得した把持動作の成功率は76%に達し、シミュレーションのみで検証した場合の34%を大幅に上回った。
この技術が持つ産業上のインパクトは多岐にわたる。製造業においては、多品種少量生産ラインでの部品ピッキング工程が直接の恩恵を受ける。自動車・電機メーカーの生産技術部門は、新部品導入時のロボット教示コストを抑制しながら把持成功率というKPIを引き上げることが可能になる。従来は専任エンジニアが長時間かけて行っていたデータ収集作業が自動化されることで、人件費の削減と設備稼働率の向上が同時に実現できる。
物流・EC業界では、商品仕分けや梱包工程での多指ロボット導入障壁が低下する。不定形な商品を扱う倉庫では、把持失敗による処理遅延やロスがオペレーションKPIに直結するが、実世界で検証済みの高品質なデータベースがあれば、多様なSKU(最小管理単位)に対応できる汎用把持システムの構築が現実的になる。新規商品が入荷するたびに都度ロボットを再教示するコストも大幅に圧縮できる見通しである。
医療・介護分野においても注目すべき応用が期待される。薬剤の調剤や手術器具の受け渡し、介護補助ロボットによる生活支援など、繊細な把持動作が求められる領域では、実環境データに基づいた信頼性の高いシステムが安全性の確保に直結する。
AutoDexはコードとデータを公開予定であり、研究機関や企業の開発部門が独自のデータ収集インフラとして利用できる点も評価される。ロボットハンドメーカーにとっては自社製品の性能評価基盤として、システムインテグレーターにとっては顧客向けソリューションの開発加速ツールとして活用の余地が広がる。多指ロボットハンドの量産化とコスト低下が進む中、データ収集の自動化はロボット導入の経済的障壁を下げる重要な補完技術として位置づけられる。
関連トピック
同セクションの記事
自己選別AIがデータ品質問題を解決
カナダの研究チームが、人手を介さずにAI自身がトレーニングデータを自動精製する手法を開発した。大規模マルチモーダルAI開発のコスト構造を根本から変える可能性がある。

AIが生垣を国土規模で自動検出、農業・保険業に変革
フランスの研究チームが衛星画像から生垣を自動検出するAIベンチマーク「Hedgementation」を公開した。農地管理の効率化や生態系サービスの定量評価に道を開く成果として注目される。
産業ロボットの自律学習、効率化へ前進
米研究者らがロボットの視覚・言語・行動モデルに能動的継続学習を組み合わせた手法「RECALL」を発表。失敗前に補完データを収集し、再訓練コストを削減できることが実証された。